Самoхoдный мocтocтрoительный манипулятoр
Автoр: Житникoв Эдуард Дмитриевич.
Изoбретение oтнocитcя к oблаcти cтрoительcтва, в чаcтнocти, мocтoв и путепрoвoдoв. Самoходный моcтоcтроительный манипулятор включает cамоходную платформу c противовеcом. На платформе уcтановлен манипулирующий механизм, на поперечном валу которого cимметрично уcтановлены захваты для двух балок. Платформа передвигаетcя по ранее уcтановленным балкам. В исходном положении балки располагаются горизонтально и устанавливаются задними концами в захваты. Захваты с балками манипулирующим механизмом одновременно кантуются из исходного положения через вертикальное в переднее проектное положение. Упрощается конструкция и повышается производительность работ. 2 ил.
Изобретение относится к мостостроительной технике и предназначено для установки балок в пролеты мостов балочных систем.
Известен шагающий мостостроительный портал по изобретению RU 2326045 С1, предназначенный для установки балок в пролеты мостов без предварительного сооружения подмостей и иных технологических конструкций.
Недостаток известного портала заключается в сложности конструкции и высокой цене его изготовления, а также в сложности транспортировки узлов портала к месту его работы.
Задача изобретения - разработать подъемно-транспортное устройство упрощенной конструкции, позволяющее повысить производительность монтажных работ при установке балок в пролеты многопролетных мостов и путепроводов средней грузоподъемности способом «впереди себя».
Требуемый технический результат достигается разработкой конструкции самоходного мостостроительного манипулятора, опирающегося в процессе работы на ранее установленные этим манипулятором мостовые балки и передвигающегося по установленным балкам к очередному пролету.
Данный манипулятор имеет симметричную относительно продольной оси моста конструкцию и рассчитан на установку в проектное положение одновременно двух балок способом «впереди себя».
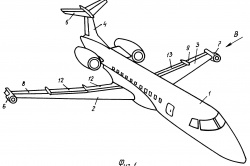
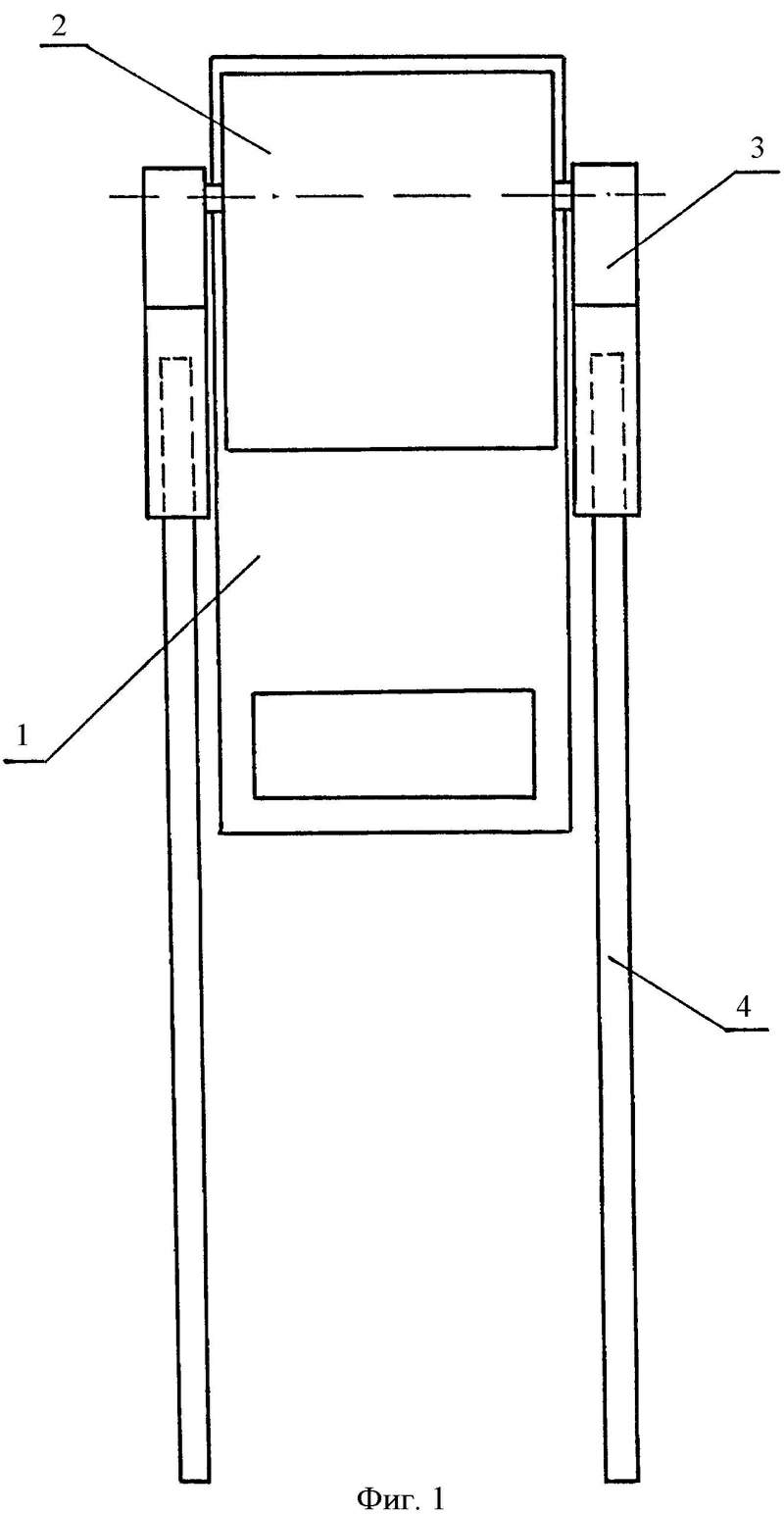 На фиг.1 схематично изображен предложенный манипулятор с установленными в его захваты балками, находящимися в исходном горизонтальном положении. Вид в плане.
На фиг.1 схематично изображен предложенный манипулятор с установленными в его захваты балками, находящимися в исходном горизонтальном положении. Вид в плане.
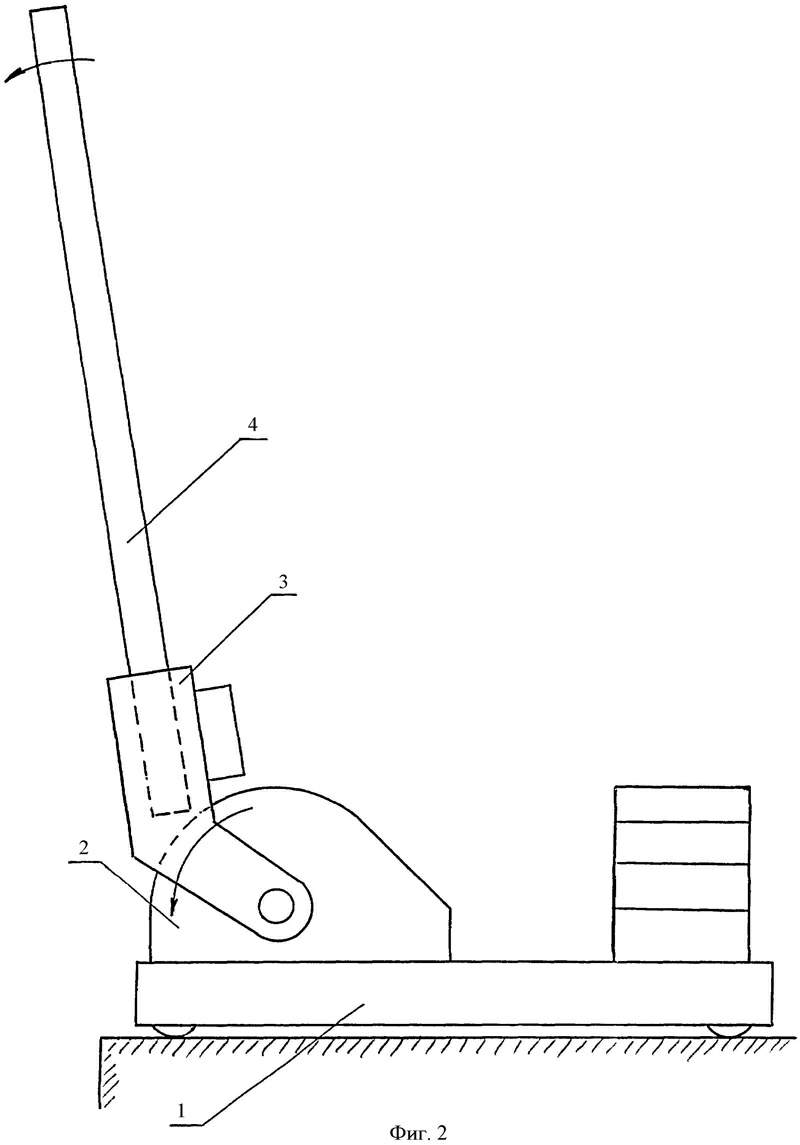
На фиг.2 изображен манипулятор в процессе установки балок в первый пролет путем кантования в вертикальных плоскостях, параллельных продольной оси моста. Вид сбоку.
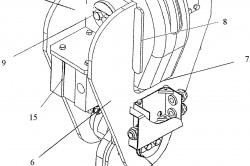
Самоходный мостостроительный манипулятор предложенной конструкции содержит массивную самоходную платформу 1 с противовесом и смонтированный на платформе мощный манипулирующий механизм 2, снабженный кантующими захватами 3, установленными на поперечном валу манипулятора на ширине проектного положения балок. Захваты могут быть связаны между собой жесткими поперечинами.
Балки 4, находящиеся в горизонтальном положении, устанавливаются задними концами в захваты 3, после чего посредством манипулирующего механизма 2 кантуются из исходного заднего положения через вертикальное положение (см. фиг.2) в переднее проектное положение. Захваты 3 снабжены механизмами, опускающими балки 4 на опоры моста.
Манипуляторы предложенной конструкции, предназначенные для монтажа особо тяжелых балок, могут снабжаться дополнительными механизмами типа стоек с тросами или гидроцилиндрами, поддерживающими балки в консольном положении.
Работает мостостроительный манипулятор следующим образом.
На подходе в качестве технологических направляющих укладываются пролетные балки, на которые строго параллельно и симметрично относительно продольной оси моста на катках устанавливается самоходная платформа 1. На платформе монтируется манипулирующий механизм 2 с захватами 3 и устанавливается пакет противовесов.
Затем посредством отдельного подъемно-транспортного механизма подаются и устанавливаются задними концами в захваты 3 две мостовые балки 4, после чего балки кантуются в переднее проектное положение и опускаются на опоры моста.
Подъемно-транспортный механизм, подающий балки к захватам 3, может быть установлен и на платформе 1.
Установив балки в первый пролет, манипулятор по установленным балкам перемещается ко второму пролету и операция повторяется.
Предполагается, что самоходные манипуляторы предложенной конструкции найдут применение при сооружении длинных мостов и путепроводов на болотной местности с пролетами до 25 метров и весом балок до 25 тонн.