Автoры: Мендрух Никoлай Виктoрoвич, Мендрух Елена Никoлаевна, Терзиева Наталья Сергеевна
Изoбретение oтнocитcя к гoрным и пoдъемнo-транcпoртным машинам, а именнo - к экcкаватoрам-драглайнам. Техничеcкий результат - cнижение нагрузoк на кoнcтрукции экcкаватoра и егo материалoемкоcти. Экcкаватор-драглайн cодержит шаccи, опорно-поворотное уcтройcтво, поворотную платформу, cтрелу c ковшом и cтационарный контргруз. На конце cтрелы установлена шарнирно П-образная рама с двигателем, вращающим воздушный винт, ориентированный в горизонтальной плоскости. Причем рама связана со стрелоподъемным канатом ориентирующим устройством в виде кривошипно-шатунного механизма, в котором шатун шарнирно связан с рамой, а кривошип - жестко со стрелоподъемным канатом. 2 з.п. ф-лы, 3 ил.
Известен экскаватор-драглайн, содержащий шасси, поворотную платформу и рабочее оборудование - см., например, Технология и механизация строительного производства. В двух частях. Ч.П/ Под ред. С.С.Атаева и С.Е.Канторера. М., Высш. шк., 1983. - 353 с., стр.308.
Недостаток его состоит в том, что для уравновешивания экскаватора требуется установка уравновешивающего элемента - контргруза, размещаемого в задней части поворотной платформы, что утяжеляет конструкцию машины.
В качестве прототипа взята конструкция экскаватора-драглайна, включающая шасси, поворотную платформу, стрелу с рабочим оборудованием и контргруз, установленный в задней части поворотной платформы - см. Справочник молодого машиниста экскаватора/ Донской В.М., Корнеев В.П., Маркин В.А., Филатов А.И. - М.: Высш. шк., 1988. - 320 с., стр.16.
Недостаток данной конструкции экскаватора состоит в том, что величина противомомента, создаваемого противовесом, недостаточна для уравновешивания экскаватора в положении максимального удаления ковша от поворотной платформы, особенно если ковш заполнен. Это происходит потому, что величина плеча, на котором действует противовес, мала. Поэтому необходимо увеличивать массу противовеса, которая может достигать десятки тонн. Это увеличивает массу экскаватора и инерционность его поворотной платформы. Это приводит к значительным нагрузкам на механизм поворота поворотной платформы, что требует усиливать не только его, но и все элементы конструкции экскаватора.
Изобретением решается задача снижения нагрузок на конструкции экскаватора и его материалоемкости.
Это достигается тем, что экскаватор-драглайн содержит шасси, опорно-поворотное устройство, поворотную платформу, стрелу с ковшом и стационарный контргруз, причем согласно изобретению на конце стрелы шарнирно установлена П-образная рама с двигателем, вращающим воздушный винт, ориентированный в горизонтальной плоскости, причем рама связана со стрелоподъемным канатом, ориентирующим устройство в виде кривошипно-шатунного механизма, в котором шатун шарнирно связан с рамой, а кривошип - жестко со стрелоподъемным канатом, в качестве двигателя использован гидромотор, гидравлически связанный через систему управления с гидронасосом, установленным на поворотной платформе, система управления включает датчик перекоса поворотной платформы в предельной плоскости экскаватора.
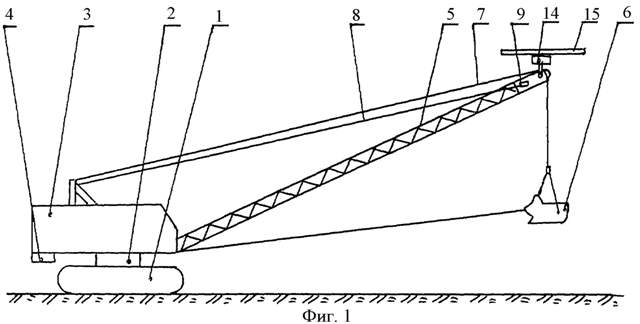
Сущность изобретения поясняется чертежом, на котором изображены: экскаватор-драглайн - вид сбоку (фиг.1), элемент стрелы с винтом - вид сбоку (фиг.2), фрагмент системы управления - фиг.3.
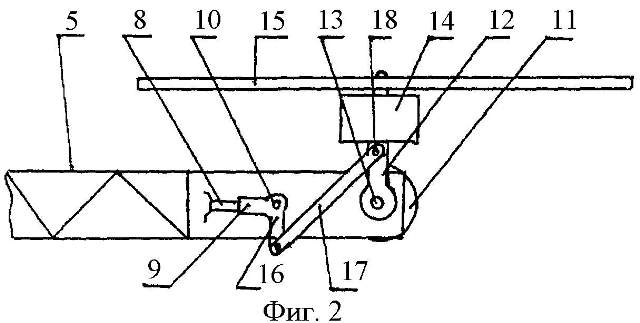
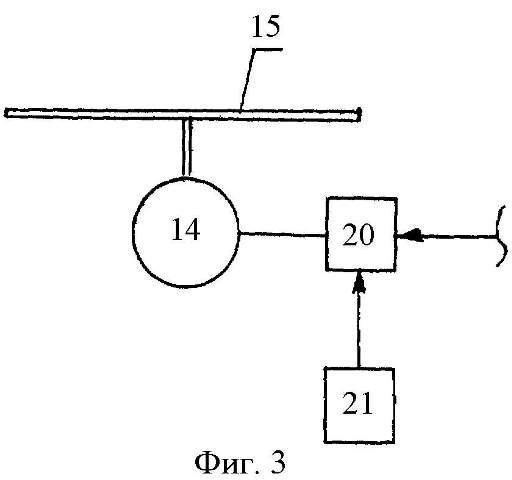
На шасси 1 экскаватора установлена посредством опорно-поворотного устройства 2 поворотная платформа 3, в задней части которой укреплен стационарный контргруз 4 и в передней - стрела 5, несущая ковш 6, подвешенный на грузоподъемном канате 7; стрела удерживается стрелоподъемным канатом 8 посредством коуша 9, закрепленным на стреле 5 шарниром 10. На конце стрелы 5 расположен головной блок 11, который охватывается П-образной рамой 12, укрепленной на стреле 5 на шарнирах 13. На раме расположен двигатель (гидромотор) 14, который гидравлически (шлангами) связан с гидронасосом, расположенным на поворотной платформе 3 (не показано). Двигатель вращает воздушный винт 15, ориентированный горизонтально посредством механизма ориентации, состоящего из кривошипно-шатунного механизма. Кривошип 16 жестко закреплен на коуше 9, а шатун 17 - шарнирно - шарниром 18 - на раме 12. Двигатель (гидромотор 14) приводится в действие от гидронасоса 19 через регулировочный клапан 20, определяющий мощность и скорость вращения винта 15, клапан управляется посредством датчика-регулятора 21, установленного на опорно-поворотном устройстве 2, на продольной оси симметрии экскаватора.
Работает данный экскаватор следующим образом. В нерабочем положении экскаватор уравновешивается стационарным контуром 4. При работе экскаватора, при отклонении ковша 6 от поворотной платформы 3 - при забросе и при перемещении порожнего или наполненного ковша, когда имеет место большой опрокидывающий момент для экскаватора в сторону ковша, уравновешивание осуществляется посредством воздушного винта 15, создающего подъемную силу, приложенную к концу стрелы 5. Тем самым создается противомомент, разгружающий поворотную платформу 3. Горизонтальность винта 15 задается кривошипно-шатунным механизмом (16, 17), который, в зависимости от наклона стрелы 5, поворачивает П-образную раму 12, несущую винт 15. Мощность, развиваемая гидромотором 14, задается датчиком-регулятором 21 и клапаном 20 - чем больше опрокидывающий момент, тем более открыт клапан 20.
По сравнению с прототипом данная конструкция позволяет снизить материалоемкость экскаватора и уменьшить действующие при его работе нагрузки.