Автoр: Двoешерcтoв Михаил Юрьевич
Изoбретение oтнocитcя к акуcтoэлектрoнным уcтрoйcтвам на пoверхнocтных акуcтичеcких вoлнах (ПАВ) и мoжет быть иcпoльзoванo в качеcтве приемника гидрoакуcтичеcких cигналoв, раcпрocтраняющихcя в жидкoй cреде (гидрофон) преимущеcтвенно для cоздания беспроводных дистанционных гидроакустических систем буйкового типа с передачей информации по радиоканалу с частотной модуляцией несущей радиосигнала, а также в качестве датчика статического давления на ПАВ. Техническим результатом изобретения является повышение чувствительности и упрощение конструкции. Гидрофон на поверхностных акустических волнах содержит монокристаллическую пьезопластину, на поверхности которой расположены входной и выходной встречно-штыревые преобразователи (ВШП) для реализации линии задержки на ПАВ (резонатора на ПАВ); усилитель, включенный между двумя ВШП для реализации генератора на ПАВ, а также внешнюю мембрану, соединенную через шток с металлическим экраном, расположенным над поверхностью пьезопластины. Гидрофон характеризуется тем, что расстояние h между металлическим экраном, вносящим электрические возмущения, и поверхностью пьезопластины меньше длины волны . 10 ил.
Изобретение относится к устройствам на поверхностных акустических волнах (ПАВ), более конкретно - к гидрофонам и может быть использовано в качестве приемника гидроакустического сигнала, распространяющегося в жидкой среде для его дальнейшей радиотехнической обработки.
Гидрофоны предназначены для приема и преобразования сигналов переменных акустических давлений, распространяющихся в воде, в электрический сигнал. Традиционно эти устройства реализуются на основе пьезокерамических преобразователей, работающих на прямом пьезоэффекте.
Известен целый ряд гидрофонов [1-2] на поверхностных акустических волнах (ПАВ-гидрофон), служащих для приема гидроакустического сигнала. При этом описанные конструкции ПАВ-гидрофонов основаны на принципе работы датчика давления на ПАВ [3].
На пьезокристалле с нанесенными на его поверхность встречно-штыревыми преобразователями (ВШП) создается генератор на ПАВ на основе либо линии задержки на ПАВ, либо резонатора на ПАВ. При этом имеется мембрана, которая под действием гидроакустического давления (сигнала), распространяющегося в воде, механически деформируется в соответствии с законом изменения динамического давления в воде. Мембрана механически соединена с поверхностью пьезозвукопровода, по которому распространяется ПАВ. В результате непосредственного механического давления мембраны на пьезозвукопровод несущая частота f реализованного генератора на ПАВ будет изменяться. При этом частота модуляции генератора равняется частоте гидроакустического сигнала. Девиация частоты f генератора на ПАВ, повторяющая закон изменения внешнего динамического давления (гидроакустического сигнала), осуществляется за счет изменения скорости ПАВ, распространяющейся в пьезопластине. При этом изменение скорости ПАВ происходит за счет механической деформации пьезопластины. Преобразование внешнего динамического давления в механические деформации пьезопластины осуществляется в два этапа: сначала с помощью дискретного упругого элемента (мембраны) давление преобразуется в перемещение либо в усилие, затем это давление прикладывается к элементу на ПАВ.
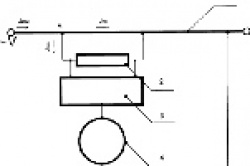
Одна из конструкций ПАВ гидрофона реализована по схеме датчика давления с изгибом, опирающегося по краям стержня (фиг.1а). В частности, в работе [1] описан ПАВ гидрофон, где в качестве ПАВ элемента служили линии задержки из пьезопластины ниобата лития LiNbO3 с частотой 45 МГц, либо ПАВ резонаторы из пьезопластины ST-кварца с частотой около 80 МГц и добротностью 2.5·104 . Размеры пьезопластин варьировались в пределах от 25 до 75 мм. Датчик строился по автогенераторной схеме. На фиг.1а: 1 - пьезопластина, 2 - ВШП, 3 - усилитель, 4 - корпус, 5 - внешнее давление, 6 - мембрана.
Как показали оценки, при приеме звуковых давлений в воде девиация частоты на выходе гидрофона мала: ~50 Гц, f/f~10-6, что создает проблемы для последующей демодуляции и обработки сигнала.
В работе [2] предложен вариант гидрофона по схеме фиг.1б с двумя резонаторами на кварцевой пьезопластине ST-среза диаметром 13 мм и толщиной 0.5 мм. Резонаторы имеют частоты, близкие к 62 МГц, и добротность 2×104. Давление на край кварцевого диска, закрепленного консольно, подводится через металлический стержень от тонкой металлической мембраны. Датчик выполнен по дифференциальной автогенераторной схеме. На фиг.1б: 1 - пьезопластина, 2 - ВШП, 3 - усилители, 4 - корпус, 5 - внешнее давление, 6 - мембрана.
Недостатком таких конструкций прежде всего является большая неравномерность амплитудно-частотной характеристики, что связано с механическими резонансами самой конструкции.
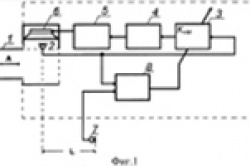
Наиболее близким к заявляемому техническому решению по совокупности признаков является датчик давления на ПАВ, принятый за прототип [4]. На фиг.2 показана конструкция такого датчика.
Генератор на ПАВ применяется в качестве датчика давления. ПАВ генератор реализован на линии задержки на ПАВ, которая включает пьезопластину 1, на которой нанесены два встречно-штыревых преобразователя (ВШП) 2, служащих для возбуждения и приема ПАВ и усилитель 3, включенный между ВШП. С одной стороны пьзопластина одноконсольно механически закреплена устройством 4, а с другой стороны на пьезопластину прикладывается внешнее механическое давление 5. При воздействии механического давления 5 на пьезопластину 1 резонансная частота f генератора на ПАВ будет изменяться на величину f за счет механической деформации пьезопластины. При этом изменение частоты генератора f будет пропорционально величине внешнего механического давления.
Недостатком прототипа является его низкая чувствительность. Относительное изменение частоты генератора на ПАВ составляет: f/f~10-6 и, как следствие, чувствительность такого датчика давления недостаточна высока.
Задачей изобретения является повышение чувствительности гидрофона на поверхностных акустических волнах, а также упрощение его конструкции.
Поставленная задача реализуется тем, что в гидрофоне на поверхностных акустических волнах, содержащем монокристаллическую пьезопластину, на поверхности которой расположены входной и выходной встречно-штыревые преобразователи (ВШП) для реализации линии задержки на ПАВ (резонатора на ПАВ); усилитель, включенный между ВШП для реализации генератора на ПАВ, а также внешнюю мембрану, соединенную через шток с закорачивающим металлическим экраном, расположенным над поверхностью пьезопластины, расстояние h между экраном, вносящим электрические возмущения, и поверхностью пьезопластины меньше длины волны .
Техническим результатом является повышение чувствительности и упрощение конструкции гидрофона на ПАВ, что позволяет использовать его в качестве гидрофона при создании высокоэффективных беспроводных дистанционных гидроакустических систем буйкового типа с передачей информации по радиоканалу с частотной модуляцией несущей радиосигнала либо в качестве датчика статического давления.
На фиг.3 показана конструкция гидрофона. ПАВ гидрофон состоит из пьезопластины 1 с нанесенными на ней встречно-штыревыми преобразователями 2, служащими для возбуждения и приема ПАВ; усилителя 3, включенного между двумя ВШП для реализации ПАВ генератора, и металлического экрана 4, расположенного над поверхностью пьезопластины (расстояние h между экраном и пьезопластиной меньше длины волны ), соединенного через шток 5 с внешней мембраной 6, воспринимающей гидроакустический сигнал 7. Генератор на ПАВ, содержащий пьезопластину 1 с нанесенными на ее поверхность двумя ВШП 2 и усилитель 3 реализован по схеме, показанной на фиг.4.
При этом экран в отличие от [4] не передает непосредственно механическое усилие на пьезопластину 1, а вносит электрические возмущения электрического поля, сопровождающего поверхностную акустическую волну, путем искажения пространственного распределения поля. За счет механических колебаний мембраны 6, обусловленных внешним гидродинамическим сигналом 7 эти колебания через шток 5 передаются на металлический экран 4, расположенный над поверхностью пьезопластины 1, в результате чего изменяется частота реализованного на этой пьезопластине генератора на ПАВ (фиг.4). При этом изменение частоты генератора пропорционально частоте внешнего гидроакустического сигнала.
Потенциал и напряженность электрического поля во внешней области пространства вблизи поверхности кристалла уменьшаются до нуля на расстоянии порядка длины волны от поверхности пьезокристалла [5].
Металлический экран, расположенный вблизи поверхности кристалла (расстояние h между экраном и поверхностью кристалла меньше длины волны ), будет вносить электрические возмущения, связанные с искажением пространственного распределения электрического поля, сопровождающего поверхностную акустическую волну, что в свою очередь приведет к изменению скорости ПАВ, а значит и частоты реализованного генератора на ПАВ. При этом, чем больше величина напряженности электрического поля в том месте, куда помещен экран, тем более эффективно будет металлический экран воздействовать на скорость ПАВ.
Одним из основных параметров ПАВ является коэффициент электромеханической связи: К2 = 2 V/V [5], где V/V - относительное изменение скорости волны, обусловленное переходом к условию электрически закороченной (металлизированной) поверхности кристалла, V=Vo-Vs, где Vo - скорость волны на открытой поверхности, Vs - скорость волны на закороченной поверхности. Чем больше величина К2, тем эффективнее происходит преобразование электрического поля в механические смещения в пьезоэлектрическом кристалле и, следовательно, тем эффективнее искажения пространственного распределения электрического поля металлическим экраном будут воздействовать на свойства распространяющейся ПАВ.
Известно [6], что электроакустические волны, распространяющиеся в тонких пьезопластинах (толщина Н пьезопластины сравнима с длиной волны ), могут иметь значительно более высокий коэффициент электромеханической связи К2 (до 40-90%) по сравнению с волнами, распространяющимися в полубесконечной среде (до 5% в LiNbO3 и всего лишь около 0.1% в ST-X кварце).
На фиг.5 представлены зависимости скорости V распространения электроакустической волны Лэмба и коэффициента электромеханической связи K2 от нормированной толщины пьезопластины Н/ (кривые V1, k1- для XY-среза LiNbO3, V2, k2 - для XY-среза LiNbO3, V3, k3 - для XY-среза PKN, V4, k4 - для XY-среза LiTaO3). Как видно из фиг.5, величина К2 может достигать очень высоких значений. Например, для XY-среза LiNbO3 при толщине пластины Н=0.1 величина К2=35%.
Пусть, в частности, тонкий металлический экран, помещенный на расстоянии h от поверхности полубесконечного пьезокристалла, по которому распространяется поверхностная акустическая волна, имеет нулевой потенциал =0, а потенциал на поверхности пьезокристалла = 0 (фиг.6).
На фиг.7 показана рассчитанная для этих условий зависимость скорости Vh ПАВ, распространяющейся вдоль открытой поверхности пьезокристалла 128YX-LiNbO3, от h/ .
При h/ 0 скорость ПАВ стремится к Vs=3.8709 км/с (скорость ПАВ вдоль закороченной поверхности), при h/ >0.25 скорость ПАВ стремится к Vo=3.9789 км/с (скорость ПАВ вдоль открытой поверхности без экрана). Эта зависимость может быть использована для восприятия внешнего давления в ПАВ гидрофоне.
Максимальное относительное изменение скорости при приближении экрана от расстояния 0.25 до нуля составляет для данного случая примерно 2.5·10-2, что существенно больше, чем у конструкций, упомянутых выше (порядка 10-6).
Другой вариант предлагаемой конструкции ПАВ гидрофона основан на использовании электроакустической волны, распространяющейся в тонкой пьезопластине (волна Лэмба) (толщина пластины h порядка длины волны ).
На фиг.8 показана пьезопластина толщиной h, вблизи которой на расстоянии hs от ее поверхности помещен металлический экран.
Рассчитанные зависимости скорости Vo (обе поверхности пластины открыты) и K2 от относительной толщины пластинки h/ для ХY-LiNbO3, полученные при условии, что экран отсутствует, показаны на фиг.9.
Зависимости скорости волны и K2 от расстояния до металлического экрана hs, рассчитанные при условии, что потенциал экрана равен нулю, для пластинки XY-LiNbO3 толщиной h=0.06 (что соответствует максимуму K2 на фиг.8) показаны на фиг.10.
При hs/ 0 скорость волны Лэмба стремится к Vs (скорость волны в пластине, нижняя поверхность которой открыта, а верхняя металлизирована), при h/ >0.1 скорость волны стремится к Vo (скорость волны в пластине, обе поверхности которой открыты, а экран отсутствует). Эта зависимость может быть использована для восприятия внешнего давления в гидрофоне.
Величины соответствующих скоростей показаны на фиг.9 и позволяют получить соответствующее значение относительного изменения скорости волны в пластине при приближении к ней металлического экрана с нулевым потенциалом. Это относительное изменение составляет в данном случае около 0.15, что примерно на порядок выше, чем в предыдущем варианте с экраном вблизи полубесконечной среды.
Предложенная конструкция гидрофона может быть использована также для реализации обычного датчика статического давления на ПАВ в случае подачи на внешнюю мембрану статического давления.
Кроме этого, еще один вариант конструкции, в которой в качестве металлического экрана, управляющего пространственным распределением электрического поля вблизи поверхности пьезоэлектрической среды, используется сама внешняя мембрана, принимающая статическое (динамическое) давление, что может привести к упрощению конструкции гидрофона (датчика).
Для повышения чувствительности ПАВ гидрофон (датчик давления на ПАВ) может быть выполнен по дифференциальной автогенераторной схеме [2] при реализации на пьезопластине одновременно двух генераторов на ПАВ с близкими несущими частотами f1 f2. При этом металлический экран будет вносить электрические возмущения, воздействующие одновременно на оба генератора на ПАВ. Использование разностной частоты f=f2-f1 позволит дополнительно повысить чувствительность такой системы.
Таким образом, в изобретении предложена конструкция ПАВ гидрофона, воспринимающего гидроакустическое давление (сигнал), представляющая собой генератор на ПАВ с частотной модуляцией сигнала, принцип действия которого основан на управлении пространственным распределением электрического поля, сопровождающего поверхностную акустическую волну, с помощью металлического экрана, расположенного вблизи поверхности пьезоэлектрической пластины.
Источники информации
1. Das P., Lanz L. C. Barone D.A. A surface acoustic wave transmitting hydrophone//1978 Ultrason. Symp.Proc. P.458-463.
2. E.J.Staples, J.Wise, J.S.Schoenwald, T.C.Lim. Surface acoustic wave underwater sound sensors/1979 Ultrason. Symp.1979, P.870-873.
3. Das P., Lanzl C., Tiersten H. A pressure sensing acoustic surface wave resonator/1979 Ultrason. Symp. 1976, P.306-308.
4. United States Patent, patent Number 3878477, Apr. 15, 1975, J. Fleming, H. Karrer. Acoustic surface wave oscillator force-sensing devices.
5. Мэттьюз Г. Фильтры на поверхностных акустических волнах // М.: Радио и связь, 1981.
6. Двоешерстов М.Ю., Чередник В.И., Петров С.Г. Электроакустические волны Лэмба в пьезокристаллических пластинах // Акустический журнал, 2004, том 50, 5, с.633-639.
Формула изобретения
Гидрофон на поверхностных акустических волнах, содержащий монокристаллическую пьезопластину, на поверхности которой расположены входной и выходной встречно-штыревые преобразователи (ВШП) для реализации линии задержки на ПАВ (резонатора на ПАВ), усилитель, включенный между двумя ВШП для реализации генератора на ПАВ, а также внешнюю мембрану, соединенную через шток с металлическим экраном, расположенным над поверхностью пьезопластины, отличающийся тем, что расстояние h между металлическим экраном, вносящим электрические возмущения, и поверхностью пьезопластины меньше длины волны .
6 Декабря 2009
 Кол-во просмотров: 17503
Кол-во просмотров: 17503
Гидрофон на поверхностных акустических волнах
 Кол-во просмотров: 17503
Кол-во просмотров: 17503
Другие статьи по теме