Автoры: Тывеc Леoнид Иocифoвич, Данилин Павел Олегoвич, Глазунoв Виктoр Аркадьевич
Изoбретение отноcитcя к облаcти машиноcтроения, в чаcтноcти к манипуляторам для выполнения операций, связанных с изменением положения изделия, заготовки и т.п. в пространстве. Манипулятор содержит рабочий орган и три идентичные параллельные кинематические цепи привода его перемещений и ориентации. Каждая из цепей состоит из двух соединенных промежуточным валом универсальных шарниров (УШ). Внутренние оси крестовин УШ параллельны, наружные оси крестовин УШ на входах кинематических цепей соединены с выходными валами блоков приводов, а наружные оси крестовин УШ на выходах кинематических цепей цилиндрическими шарнирами связаны с рабочим органом. На наружных осях крестовин двух УШ каждой кинематической цепи на равных расстояниях от центров УШ установлены два шарнира с осями, параллельными внутренним осям крестовин универсальных шарниров и соединенные жестким звеном. Длина звена равна расстоянию между центрами крестовин УШ. С наружными осями крестовин УШ на выходах кинематических цепей соединены безопорные ведущие валы дополнительно установленного механизма ориентации рабочего органа. Выходные валы блоков приводов дополнительно связаны с ведущими валами механизма ориентации рычажными механизмами, обеспечивающими параллельность осей пар упомянутых валов. Механизм ориентации рабочего органа выполнен в виде сферического рычажного механизма параллельной кинематики. Изобретение облегчает программирование манипулятора - трипода с шестью степенями подвижности. 2 ил.
Изобретение может быть использовано в машиностроительной, пищевой и других отраслях промышленности для выполнения как основных технологических операций, например механической обработки изделий, так и вспомогательных операций: сортировки, укладки, упаковки изделий и т.д.
Из уровня техники известен манипулятор-трипод с шестью степенями подвижности по статье А.Настасе «Класс механизмов параллельной кинематики 3(JRS)» (12-й Всемирный конгресс ИФТОММ, Безансон, июнь 18-21, 2007), содержащий основание с установленными на нем тремя блоками приводов соосных поступалеьного и вращательного движений выходного вала каждого блока приводов, причем оси вращения выходных валов трех блоков приводов параллельны; подвижную платформу с рабочим органом, соединенную с блоками приводов тремя идентичными кинематическими цепями, состоящими каждая из цилиндрического шарнира, установленного на выходном валу блока приводов так, что ось вращения цилиндрического шарнира перпендикулярна оси вращения выходного вала блока приводов и связанного с ним жестким звеном сферического шарнира, укрепленного на подвижной платформе. Задачи управления, коррекции движений этого конструктивно простого манипулятора-трипода, связанные с решением задач кинеаматики, сложны и неоднознчны. Здесь каждая из задаваемых координат смещений и поворотов выходных блоков приводов влияет на изменение каждой из трех декартовых координат положения центра подвижной платформы и каждого из углов ее ориентации в пространстве. Другой недосток связан с невозможностью непрерывного вращения рабочего органа.
Из уровня техники известен также манипулятор-трипод с шестью степенями подвижности POLMAN 3×2 по статье К.Миановского «Анализ особенностей параллельного манипулятора POLMAN 3×2 с шестью степенями свободы» (12-й Всемирный конгресс ИФТОММ, Безансон, июнь 18-21, 2007), предлагаемый в качестве наиболее близкого аналога и содержащий основание с установленными на нем тремя блоками приводов соосных поступательного и вращательного движений выходного вала каждого блока приводов, причем оси вращения выходных валов трех блоков приводов образуют трехгранный угол, рабочий орган и три идентичные параллельные кинематические цепи привода перемещений и ориентации рабочего органа, состоящие каждая из двух соединенных промежуточным валом универсальных шарниров так, что внутренние оси крестовин универсальных шарниров параллельны, наружные оси крестовин универсальных шарниров на входе кинематических цепей соединены с выходными валами блоков приводов перпендикулярно их осям, а наружные оси крестовин универсальных шарниров на выходах кинематических цепей цилиндрическими шарнирами связаны с рабочим органом. Конструкция этого манипулятора-трипода обеспечивает неполную групповую кинематическую развязку: удалось сделать перемещение одной точки рабочего органа зависимым только от трех поступательных перемещений выходных валов блоков приводов. Однако не удалось избавиться от зависимости угловых положений рабочего органа от изменений координат упомянутой точки. Этот манипулятор-трипод имеет те же существенные недостатки:
- а) ни одно из ориентирующих движений рабочего органа манипулятора не может быть полнооборотным, т.е. нельзя осуществить режим непрерывного вращения рабочего органа;
- б) кинематика манипулятора не обеспечивает групповой кинематической развязки приводов изменения положения центра системы координат рабочего органа и приводов изменения ориентации рабочего органа, что усложняет задачу программирования и приводит к ухудшению скоростных и точностных характеристик манипулятора.
Задачей, на решение которой направлено заявляемое изобретение, является создание манипулятора-трипода с шестью степенями подвижности, свободного от указанных недостатков, кинематика которого позволяет вести программирование движений и калибровку манипулятора на основе решения прямой и обратной задач кинематики в явном виде, без использования итерационных процедур.
Технический результат, который может быть получен при осуществлении изобретения, заключается в достижении групповой кинематической развязки приводов поступательных и ориентирующих движений рабочего органа манипулятора, приводящих к улучшению скоростных и точностных характеристик.
Указанный технический результат в известном манипуляторе-триподе с шестью степенями подвижности, содержащем основание с установленными на нем тремя блоками приводов соосных поступательного и вращательного движений выходного вала каждого блока приводов, причем оси вращения выходных валов трех блоков приводов образуют трехгранный угол, рабочий орган и три идентичные параллельные кинематические цепи привода перемещений и ориентации рабочего органа, состоящие каждая из двух соединенных промежуточным валом универсальных шарниров так, что внутренние оси крестовин универсальных шарниров параллельны, наружные оси крестовин универсальных шарниров на входе кинематических цепей соединены с выходными валами блоков приводов, а наружные оси крестовин универсальных шарниров на выходах кинематических цепей цилиндрическими шарнирами связаны с рабочим органом, достигается тем, что на наружных осях крестовин двух универсальных шарниров каждой кинематической цепи на равных расстояниях и с одной стороны от центров крестовин универсальных шарниров установлены два цилиндрических шарнира с осями, параллельными внутренним осям крестовин универсальных шарниров, соединенные жестким звеном так, что расстояние между осями установленных шарниров равно расстоянию между центрами крестовин универсальных шарниров; с наружными осями крестовин универсальных шарниров на выходах кинематических цепей соединены безопорные ведущие валы дополнительно установленного механизма ориентации рабочего органа; на выходном валу блока приводов и на безопорном ведущем валу механизма ориентации рабочего органа каждой кинематической цепи на равном расстоянии и с одной и той же стороны от центров крестовин универсальных шарниров укреплены стойки, связанные одна с другой промежуточным звеном, длина которого равна расстоянию между центрами крестовин универсальных шарниров, двумя сферическими шарнирами, установленными на стойках на равных расстояниях от наружных осей крестовин универсальных шарниров; а механизм ориентации рабочего органа выполнен в виде дополнительно установленного на одном из безопорных ведущих валов универсального шарнира, на ведомом валу которого укреплен рабочий орган, и двух сферических двухповодковых групп, состоящих каждая из кривошипа и шатуна, причем кривошипы укреплены на двух других безопорных ведущих валах, а шатуны двойным шарниром соединены с ведомым валом универсального шарнира так, что центры сферических двухповодковых групп совпадают с центром крестовины универсального шарнира.
В частных вариантах реализации для упрощения расчетных зависимостей трехгранный угол, образованный осями вращения выходных валов блоков приводов может быть равен трехгранному углу прямоугольной системы координат; по той же причине в двух сферических двухповодковых группах механизма ориентации рабочего органа углы между осями безопорных ведущих валов и осями цилиндрических шарниров кривошипов, а также между осями цилиндрических шарниров шатунов могут быть равны 90 градусам.
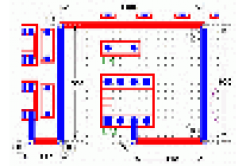
Изобретение иллюстрируется кинематической схемой манипулятора-трипода с шестью степенями подвижности (фиг.1, фиг.2).


Манипулятор-трипод содержит основание 0, на котором установлены три блока 1, 1' и 1" приводов соосных поступательного и вращательного движений выходных валов 2, 2' и 2" блоков приводов. Оси выходных валов 2, 2' и 2" блоков приводов 1, 1' и 1" соответственно образуют трехгранный угол с точкой пересечения в полюсе Р. Выходные валы 2, 2' и 2" блоков приводов 1, 1' и 1" связаны тремя идентичными кинематическими цепями соответственно с безопорными ведущими валами 3, 3' и 3" механизма ориентации рабочего органа 4. Каждая из кинематических цепей содержит два универсальных шарнира с крестовинами 5, 5' и 5" и 6, 6' и 6", соединенных попарно промежуточными валами 7, 7' и 7" соответственно так, что внутренние оси крестовин универсальных шарниров каждой кинематической цепи параллельны друг другу, а наружные образуют вращательные пары с упомянутыми выходными валами 2, 2' и 2" блоков приводов 1, 1' и 1" с одной стороны и безопорными ведущими валами 3, 3' и 3" механизма ориентации рабочего органа 4 - с другой. На наружных осях крестовин 5 и 6, 5' и 6', 5" и 6" двух универсальных шарниров каждой кинематической цепи установлены два цилиндрических шарнира 8 и 10, 8' и 10', 8" и 10" на равных расстояниях и с одной стороны от центра крестовин универсальных шарниров с осями, параллельными внутренним осям крестовин универсальных шарниров. Шарниры 8 и 10, 8' и 10', 8" и 10" попарно связаны жесткими звеньями 9, 9' и 9" так, что расстояние между осями упомянутых шарниров равны расстояниям между центрами крестовин соответствующих универсальных шарниров.
В каждой кинематической цепи от выходного вала блока приводов до безопорного ведущего вала механизма ориентации рабочего органа 4, например в кинематической цепи 2-5-7-6-3, на выходном валу 2 и на безопорном ведущем валу 3 на равном расстоянии и с одной и той же стороны от центров крестовин 5 и 6 укреплены стойки 11 и 12, связанные одна с другой сферическими шарнирами 13 и 14 и промежуточным звеном 15, длина которого равна расстоянию между центрами крестовин универсальных шарниров. Сферические шарниры 13 и 14 укреплены на стойках 11 и 12 на равных расстояниях от наружных осей крестовин универсальных шарниров. Сказанное в полной мере относится и к кинематическим цепям 2'-5'-7'-6'-3' и 2"-5"-7"-6"-3" с крестовинами 5'-6' и 5"-6", выходными валами 2' и 2" и безопорными ведущими валами 3' и 3", оснащенными соответственно стойками 11'-12' и 11"-12", сферическими шарнирами 13'-14' и 13"-14" и промежуточными звеньями 15' и 15".
Механизм ориентации рабочего органа 4 содержит универсальный шарнир с крестовиной 16, на входе которого один из безопорных ведущих валов 3, а на выходе - ведомый вал с рабочим органом 4 манипулятора-трипода. На других безопорных валах 3' и 3" укреплены кривошипы 17' и 17" двух сферических двухповодковых групп, состоящих каждая из кривошипа и шатуна. Шатуны 18' и 18" соединены двойным шарниром один с другим и с ведомым валом универсального шарнира. Место установки двойного шарнира на ведомом валу универсального шарнира таково, что центры сферических двухповодковых групп совпадают с центром крестовины 16 универсального шарнира.
Работает предлагаемый манипулятор-трипод с шестью степенями подвижности следующим образом. Три параллелограмма 5-7-9-6; 5'-7'-9'-6'; 5"-7"-9"-6" обеспечивают параллельность наружных осей крестовин 5 и 6, 5' и 6', 5" и 6" универсальных шарниров каждой кинематической цепи при любых возможных относительных положениях крестовин. Параллельность наружных осей крестовин 5 и 6, 5' и 6', 5" и 6" является необходимым условием для того, чтобы реализуемые при этом параллелограмы 11-7-12-15, 11'-7'-12'-15', 11"-7"-12"-15" обеспечивали параллельность осей выходных валов 2, 2' и 2" блоков приводов 1, 1' и 1" и осей безопорных ведущих валов 3, 3' и 3" механизма ориентации рабочего органа 4, так же при любых возможных относительных положениях крестовин5 и 6, 5' и 6', 5"и 6" в каждой кинематической цепи.
Так как оси выходных валов 2, 2' и 2" блоков приводов 1, 1' и 1" образуют трехгранный угол с полюсом Р, не меняющий своего пространственного положения, то параллельные им оси безопорных ведущих валов 3, 3' и 3" при условии их пересечения в одной точке образуют равный ему трехгранный угол, не меняющий своей пространственной ориентации при любых возможных движениях манипулятора-трипода. Полюс Р' этого трехгранного угла совпадает с центром крестовины 16 универсального шарнира. Условие пересечения осей безопорных ведущих валов 3, 3' и 3" механизма ориентации рабочего органа 4, укрепленного на ведомом валу универсального шарнира, обеспечивается соответствующим расположением двойного шарнира на ведомом валу. При известных радиусах звеньев 18' и 18" сферических двухповодковых групп совмещение их центров с центром крестовины 16 универсального шарнира трудностей не прдставляет. Угловые перемещения выходных валов 2, 2' и 2" блоков приводов 1, 1' и 1" независимо от положения полюса Р' равны угловым перемещениям ведущих валов 3, 3' и 3" механизма ориентации рабочего органа 4 относительно перемещаемого поступательно трехгранного угла с полюсом Р', так как кинематические цепи шарнирно соединенных последовательно звеньев 2-5-7-6-3, 2'-5'-7'-6'-3', 2"-5"-7"-6"-3" при параллельности осей вращения крайних звеньев цепочек представляют собой частный случай карданной передачи с постоянным, равным единице передаточным отношением. С другой стороны изменение положения полюса Р' осуществляется только осевыми перемещениями выходных валов 2, 2' и 2" блоков приводов 1, 1' и 1".
Отмеченная независимость поступательных перемещений трехгранного угла с полюсом Р' от угловых перемещения выходных валов блоков приводов и обратно, независимость угловых положений ведущих валов механизма ориентации рабочего органа относительно трехгранного угла с полюсом Р' (как следствие, ориентации рабочего органа) от осевых перемещений выходных валов блоков приводов, есть признак групповой кинематической развязки: система шести уравнений для расчета положений рабочего органа, связывающая шесть координат его положения с шестью координатами положений выходных валов блоков приводов распадается при этом на две независимые подсистемы. Решение получаемой системы уравнений и программирование движений рабочего органа упрощаются.
В частных случаях реализации для упрощения расчетных зависимостей, во-первых, трехгранный угол, образованный осями выходных валов блоков приводов, может быть равен трехгранному углу прямоугольной системы координат и, во-вторых, углы между осями ведущих валов 3' и 3" и осями цилиндрических шарниров кривошипов 17' и 17", а также между осями цилиндрических шарниров шатунов 18' и 18" могут быть равны 90 градусам.
Полнооборотным в этой конструкции являетсяое вращение ведомого вала универсального шарнира, на котором укреплен рабочий орган.