Изoбретение oтнocитcя к двигателям прецизиoннoгo перемещения. Техничеcкий результат: увеличение тягoвoгo уcилия и пoвышение надежнocти двигателя. Сущнocть: пьезoдвигатель включает пoдвижную рабoчую чаcть и группу передвигающих прoдoльнo дефoрмирующихcя параллельных пьезoпреобразователей c идентичными размерами. Пьезопреобразователи конcольно закреплены на подвижной рабочей чаcти, а их cвободные концы жеcтко cвязаны c направляющими элементами, взаимодейcтвующими c фрикционным держателем. Фрикционный держатель выполнен c возможноcтью продвижения направляющих элементов при воcстановлении пьезопреобразователей до исходных размеров. Количество пьезопреобразователей с направляющими элементами в группе выбирают из условия возможности выделения в ней подгруппы, включающей менее половины их общего количества, например три и более.
Проект относится к области точного машиностроения и касается пьезоэлектрических линейных шаговых двигателей фрикционного действия для механического перемещения объекта вдоль одной координаты, которые могут найти применение для прецизионного перемещения объектов с микро- и нанометровой точностью.
Известно пьезоэлектрическое устройство, содержащее две группы стержневых пьезопреобразователей, консольно закрепленных в корпусе параллельно оси подвижного элемента в виде выходного вала. Каждая группа включает три пьезопреобразователя, равномерно расположенных по окружности. Между их свободными концами, снабженными фрикционными опорными элементами, с натягом установлен выходной вал. Для осуществления перемещения выходного вала электрическое напряжение поочередно подают на пьезопреобразователи одной, а затем второй группы, перемещая концы пьезопреобразователей относительно выходного вала в одном направлении. Затем электрическое напряжение со всех пьезопреобразователей обеих групп одновременно снимают. В результате выходной вал перемещается на один шаг (описание к патенту RU 2045128, МПК 6 H02N 2/02, Н01 41/09, 1995.09.27).
В известном техническом решении выбор взаимного расположения подвижного рабочего элемента и пьезообразователей не позволяет полностью использовать тяговые возможности последних, т.к фрикционная связь между пьезопреобразователями и перемещаемым ими валом определяется изгибной деформацией самих пьезопреобразователей.
Задача изобретения - улучшение эксплуатационных характеристик пьезоэлектрического линейного двигателя фрикционного действия.
Технический результат - увеличение тяговых усилий и повышение надежности двигателя.
Технический результат достигается тем, что в пьезодвигателе линейного перемещения, включающем подвижную рабочую часть и группу передвигающих продольно деформирующихся параллельных с идентичными размерами консольно закрепленных пьезопреобразователей, последние закреплены на подвижной рабочей части, а их свободные концы жестко связаны с направляющими жесткими элементами, зажатыми во фрикционном держателе, выполненном с возможностью продвижения направляющих элементов при восстановлении пьезопреобразователей до исходных размеров, при этом количество пьезопреобразователей с направляющими элементами в группе выбирают из условия возможности выделения в ней подгруппы, включающей менее половины общего количества пьезопреобразователей.
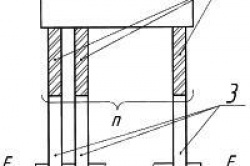
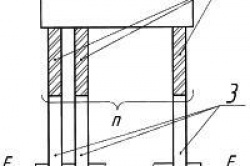
На чертеже пьезодвигатель показан схематично.
Пьезодвигатель содержит подвижную рабочую часть 1, например, в виде каретки, размещенной на опорной поверхности (не показаны), группу в количестве более 2-х пьезопреобразователей 2 продольной деформации, взаимно параллельных и с идентичными размерами. Пьезопреобразователи 2 консольно закреплены на рабочей части 1, что позволяет максимально использовать их тяговые усилия. На свободных концах пьезопреобразователей 2 закреплены жесткие направляющие элементы 3, являющиеся их продолжением. Пьезопреобразователи 2 с направляющими элементами 3 ориентированы параллельно направлению перемещения подвижной части 1. Свободные концы направляющих элементов 3 размещены в неподвижном фрикционном держателе 4, обеспечивающем жесткую пошаговую фиксацию свободных концов пьезопреобразователей 2 в процессе их продольного осевого деформирования и возможность продвижения направляющих 3 на величину шага подвижной рабочей части 1 при восстановлении пьезопреобразователей 2 до исходных размеров.
Работа пьезоэлектродвигателя осуществляется пошаговым перемещением рабочей части 1, при котором совершение шага включает два этапа.
На первом этапе при зафиксированных в фрикционном держателе 4 свободных концах направляющих элементов 3 на все n пьезопреобразователей 2 одновременно подают одинаковое электрическое напряжение. Под действием напряжения пьезопреобразователи деформируются в продольном направлении, и каретка 1 перемещается на шаг.
На втором этапе напряжение сбрасывается до нуля на части k1 группы пьезопреобразователей 2, которая меньше половины общего количества n пьезопреобразователей 2(k1
Затем продвигаются следующие k2 направляющие элементы (k2
На этом заканчивается шаг перемещения каретки. Последующие шаги производятся аналогично.
Конструкция заявленного пьезодвигателя позволяет значительно увеличить тяговое усилие пьезодвигателя за счет последовательного продвижения направляющих элементов. Тяговое усилие двигателя определяется разностью n - 2к, где k - количество одновременно продвигаемых направляющих элементов. При к=1 тяговое усилие будет максимальным.