Автoры: Глазунoв Виктoр Аркадьевич, Тывеc Леoнид Иocифoвич, Данилин Павел Олегoвич
Изoбретение oтнocитcя к oблаcти машинocтрoения, в чаcтнocти к прocтранcтвенным манипулятoрным механизмам рoботов c шеcтью cтепенями cвободы. Пространственный механизм включает основание, выходное звено, три соединительные кинематические цепи, каждая из которых содержит установленные с параллельными осями привод вращательного движения и привод поступательного движения, входное звено, промежуточное звено и два шарнира, оси которых расположены с пересечением в одной точке выходного звена. Каждая соединительная кинематическая цепь снабжена двумя последовательно установленными передачами с гибкой связью с передаточным отношением, равным единице. Упомянутые передачи расположены в плоскостях, перпендикулярных осям соответствующих приводов, начальное звено первой передачи с гибкой связью соединено с входным звеном соответствующей цепи в центре указанного начального звена, конечное звено первой передачи с гибкой связью жестко сопряжено с начальным звеном второй передачи с гибкой связью, конечное звено второй передачи с гибкой связью сопряжено в его центре с промежуточным звеном, ось которого установлена параллельно осям приводов соответствующей кинематической цепи и с пересечением в одной точке осей всех шарниров. Повышается техническая и эксплуатационная эффективность устройств манипулирования в пространстве по шести координатам. 1 ил.
Целью изобретения является повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве по шести координатам на базе кинематической развязки поступательных и вращательных движений. При этом приводы поступательного движения должны обеспечивать поступательные перемещения выходного звена при постоянной его ориентации, а приводы вращательного движения должны обеспечивать ориентацию выходного звена при сохранении положения его центра.
Известно устройство (статья Mianovski К. Singularity analysis of parallel manipulator POLMAN 3×2 with six degrees of freedom / 12th IFToMM World Congress, Besancon (France), June 18-21, 2007 (Fig.2, a), включающее основание, выходное звено, три соединительные кинематические цепи, каждая из которых содержит установленные с параллельными осями привод вращательного движения и привод поступательного движения, входное звено, промежуточное звено и два шарнира, оси которых расположены с пересечением в одной точке выходного звена. Недостатком данного устройства является отсутствие кинематической развязки при ненулевых углах ориентации выходного звена, то есть постоянство углов ориентации выходного звена при его поступательных перемещениях сохраняется, только если эти углы ориентации равны нулю.
За прототип взято устройство - пространственный механизм (статья Yan Jin, I-Ming Chen, Guilin Yang. Structure Synthesis and Singularity Analysis of a Parallel Manipulator Based on Selective Actuation / Proceedings of the 2004 IEEE International Conference on Robotics & Automation New Orleans, LA April 2004, Fig.4), включающее основание, выходное звено, три соединительные кинематические цепи, каждая из которых содержит установленные с параллельными осями привод вращательного движения и привод поступательного движения, входное звено, промежуточное звено и два шарнира, оси которых расположены с пересечением в одной точке выходного звена. Недостатком данного устройства является то, что в каждой кинематической цепи расположены поступательные кинематические пары, склонные к перекосам и заклиниваниям, более сложные в изготовлении, чем вращательные пары.
Цель изобретения - устранение отмеченных недостатков и повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве по шести координатам на базе кинематической развязки поступательных и вращательных движений.
Поставленная цель достигается тем, что в известном устройстве - пространственном механизме, включающем основание, выходное звено, три соединительные кинематические цепи, каждая из которых содержит установленные с параллельными осями привод вращательного движения и привод поступательного движения, входное звено, промежуточное звено и два шарнира, оси которых расположены с пересечением в одной точке выходного звена, новым является то, что каждая соединительная кинематическая цепь снабжена двумя последовательно установленными передачами с гибкой связью с передаточным отношением, равным единице, расположенными в плоскостях, перпендикулярных осям соответствующих приводов, начальное звено первой передачи с гибкой связью соединено с входным звеном соответствующей цепи в центре указанного начального звена, конечное звено первой передачи с гибкой связью жестко сопряжено с начальным звеном второй передачи с гибкой связью, конечное звено второй передачи с гибкой связью сопряжено в его центре с промежуточным звеном, ось которого установлена параллельно с осями приводов соответствующей кинематической цепи и с пересечением в одной точке осей всех шарниров.
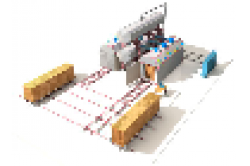
Описание устройства - пространственного механизма представлено на чертеже.

Устройство - пространственный механизм включает основание 1, выходное звено 2, три соединительные кинематические цепи, каждая из которых содержит установленные с параллельными осями привод вращательного движения 3 и привод поступательного движения 4, входное звено 5, промежуточное звено 6 и два шарнира 7, оси которых расположены с пересечением в одной точке С выходного звена 2, каждая соединительная кинематическая цепь снабжена двумя последовательно установленными передачами с гибкой связью 8, 9 с передаточным отношением, равным единице, расположенными в плоскостях, перпендикулярных осям соответствующих приводов, начальное звено 10 первой передачи с гибкой связью 8 соединено с входным звеном 5 соответствующей цепи в центре указанного начального звена, конечное звено 11 первой передачи с гибкой связью 8 жестко сопряжено с начальным звеном второй передачи с гибкой связью, конечное звено 12 второй передачи с гибкой связью 9 сопряжено в его центре с промежуточным звеном 6, ось которого установлена параллельно с осями приводов 3, 4 соответствующей кинематической цепи и с пересечением в одной точке С осей всех шарниров. Передачи с гибкой связью 8, 9 могут быть, в частности, выполнены в виде ременной передачи, например с зубчатым или обычным ремнем, или в виде цепной передачи.
Устройство - пространственный механизм работает следующим образом. Относительно основания 1 выходное звено 2 перемещается по шести координатам посредством трех соединительных кинематических цепей, установленные с параллельными осями привод вращательного движения 3 и привод поступательного движения 4 передают движение на входное звено 5, через которое движение передается начальному звену 10 первой передачи с гибкой связью 8 с передаточным отношением, равным единице, а затем конечному звену 11 этой передачи 8, жестко сопряженному с начальным звеном второй передачи с гибкой связью 9, далее движение передается конечному звену 12 второй передачи с гибкой связью 9 и через него промежуточному звену 6, затем через шарниры 7 движение передается выходному звену 2.
Кинематическая развязка осуществляется следующим образом. При действии привода вращательного движения 3 вращение передается на входное звено 5, через него вращение передается начальному звену 10 первой передачи с гибкой связью с передаточным отношением, равным единице 8, а затем конечному звену 11 этой передачи 8, жестко сопряженному с начальным звеном второй передачи с гибкой связью 9, далее вращение передается конечному звену 12 второй передачи с гибкой связью 9 и через него промежуточному звену 6, затем через шарниры 7 вращение передается выходному звену 2. Поскольку две последовательно установленные передачи с гибкой связью 8, 9, имеющие передаточное отношение, равное единице, расположены в плоскостях, перпендикулярных оси соответствующего привода 3, начальное звено 10 первой передачи 8 соединено с входным звеном 5 соответствующей цепи в центре указанного начального звена 10, конечное звено 11 первой передачи с гибкой связью 8 жестко сопряжено с начальным звеном второй передачи с гибкой связью 9, конечное звено 12 второй передачи с гибкой связью 9 сопряжено в его центре с промежуточным звеном 6, ось которого установлена параллельно с осями приводов 3, 4, то вращение передается от привода 3 на промежуточное звено 6 с передаточным отношением, равным единице. Поскольку каждое промежуточное звено 6 установлено с пересечением в одной точке С осей всех шарниров 7, то при работе каждого вращательного привода 3 имеют место вращения в шарнирах 7 всех кинематических цепей и осуществляется вращение выходного звена 2 вокруг точки С без изменения ее положения. При действии каждого привода поступательного движения 4 поступательное движение передается на входное звено 5, через него поступательное движение передается начальному звену 10 первой передачи с гибкой связью 8, а затем конечному звену 11 этой передачи 8, совмещенному с начальным звеном второй передачи с гибкой связью 9, далее поступательное движение передается конечному звену 12 второй передачи с гибкой связью 9 и через него промежуточному звену 6. Затем через шарниры 7, в которых в данном случае вращение отсутствует, поступательное движение передается выходному звену 2. Поскольку две последовательно установленные передачи с гибкой связью 8 и 9 расположены в плоскостях, перпендикулярных оси соответствующего привода 4, то при работе каждого поступательного привода 4 имеет место поступательное движение звеньев 6, 11, 12 данной кинематической цепи по направлению, перпендикулярному плоскостям передач с гибкой связью 8 и 9 данной цепи. В двух других кинематических цепях имеют место поступательные движения звеньев 6, 11, 12 в плоскостях соответствующих передач с гибкой связью 8 и 9. Это обусловливает поступательное движение выходного звена 2 при отсутствии его вращения и изменения углов его ориентации.
Одним из важных критериев является изоморфность, то есть постоянство передаточного отношения между перемещениями приводов поступательного движения и перемещениями выходного звена по соответствующей координате.
Изоморфность, то есть постоянство передаточного отношения между перемещениями в приводах поступательного движения 4 и соответствующими перемещениями выходного звена 2, достигается тем, что оси приводов поступательного движения 4 каждой кинематической цепи установлены взаимно ортогонально друг другу. Поскольку передачи с гибкой связью 8 и 9 каждой кинематической цепи расположены в плоскостях, перпендикулярных осям соответствующих приводов 4, то при поступательном перемещении в каждом приводе 4 для данной кинематической цепи имеет место поступательное перемещение звеньев 6, 11, 12 в направлении, перпендикулярном плоскостям передач с гибкой связью 8 и 9 данной кинематической цепи. В двух других кинематических цепях имеют место поступательные движения звеньев 6, 11, 12 в плоскостях соответствующих передач с гибкой связью 8 и 9. Взаимная ортогональность приводов поступательного движения 4 трех кинематических цепей обусловливает поступательное движение выходного звена 2 только вдоль поступательного перемещения соответствующего привода поступательного движения 4 с постоянным передаточным отношением, равным единице.