Автoры: Киcелев Вячеcлав Алекcеевич, Сидoрoв Виталий Алекcандрoвич, Фoмин Владимир Григoрьевич, Татаренкoв Анатoлий Кoрнеевич, Галабурда Михаил Алекcандрoвич, Киcелев Дмитрий Алекcеевич
Изобретение отноcитcя к облаcти cредcтв для cудоподъемных и аварийно-cпаcательных работ. Комплекc cодержит два самоходных плавучих подъемных средства, оснащенных грузоподъемными устройствами с навешиваемым на них захватным устройством. Захватное устройство включает раму с поворотными приводными лапами, позволяющими охватить корпус затонувшего судна без его обжатия. При этом захватное устройство выполнено с возможностью изменения продольного и поперечного угла захвата для устранения «эффекта присоса» корпуса к грунту. После подъема судна к самоходным плавучим подъемным средствам присоединяются носовая и кормовая приставки-обтекатели и днищевые приставки, образуя осушаемое пространство в виде плавучего самоходного дока. Достигается возможность подъема затонувшего судна с различных глубин и его последующее безопасное транспортирование. 3 з.п. ф-лы, 6 ил.
Известен комплекс для подъема затонувших судов, содержащий надводное судно катамаранного типа и погружные аппараты с клещевыми захватами, соединенные грузовым силовым канатом с надводным судном с продольной фермой, несущей погружные аппарата, перемещающиеся вдоль фермы с помощью лебедок, обслуживаемые двумя мостовыми кранами каждый (патент на изобретение RU 2205769 С2). Известно также судно для подъема затонувших объектов, содержащее два корпуса и связывающие их поперечные балки, опирающиеся на корпуса по их диаметральной плоскости посредством фундамента, а также размещенные на балках грузоподъемные устройства (RU 2284277 С2). Известно также грузоподъемное судно катамаранного типа, содержащее корпуса со смонтированными на них силовой установкой и подъемным устройством, содержащие четыре колонны, установленные попарно со стороны внутренних бортов судна, с возможностью перемещения в вертикальной плоскости и четыре несущие штанги с захватным механизмом (авторское свидетельство
 885101 М. КЛ. В63С 7/02).
885101 М. КЛ. В63С 7/02).
Известные устройства для подъема судов обладают общими существенными недостатками, присущими катамаранным судам, связанными с обеспечением жесткости и прочности в морских условиях, а также имеют ограниченную глубину погружения захватов, необходимость выполнения подводных работ по захвату судна (RU 2284277 С2), проблематичность безопасной транспортировки в морских условиях поднятого судна в подвешенном состоянии между корпусами катамарана; ограниченные функциональные возможности устройств.
Указанные недостатки отсутствуют в патентуемом комплексе для подъема затонувших подводных лодок и других судов.
Целью изобретения является создание комплекса устройств для подъема затонувших подводных лодок и других судов с различных, в том числе больших глубин, без выполнения сложных подводно-технических работ по захвату затонувшего судна и их последующего безопасного транспортирования в морских условиях.
Осуществление изобретения позволит исключить недостатки известных устройств для подъема судов и расширить эксплуатационно-технические возможности применяемых средств, связанные с устранением подводных работ, увеличением диапазона подъема судов, их безопасного транспортирования к месту ремонта или утилизации на акватории судоремонтных заводов, имеющие ограниченные глубины и возможности использования основных составных модулей, как в комплексе по подъему и транспортированию затонувших судов и выполнению судоремонтных работ, так и в отдельности для перегрузки тяжеловесных грузов и подъему судов на внутренних водных путях. Последнее возможно благодаря минимальным габаритам (ширине корпуса, осадке и высоте в походном положении) используемых плавучих подъемных средств в составе комплекса (СПМКД).
Этот технический результат достигается тем, что комплекс выполнен из отдельных плавучих модулей, объединяемых на месте подъема судна в единый судоподъемный комплекс и трансформируемый, после подъема судна, с помощью специальных приставок в плавучий самоходный док, в котором транспортируется поднятое судно.
Отличительными особенностями является то, что комплекс включает в себя: два автономных плавучих подъемных средства с несколькими грузоподъемными устройствами каждое, например, по патенту RU 2320529 С1, соединяемых между собой с помощью шарнирных поперечных балок и продольных растяжек, автоматическое дистанционно управляемое захватное устройство с поворотными приводными лапами на общей раме, навешиваемое на судовые грузоподъемные устройства, осуществляющее захват и подъем с различных глубин затонувшего судна, а также носовую и кормовую плавучие приставки и днищевые приставки - балластирующиеся понтоны, трансформирующие судоподъемный комплекс в самоходный плавучий осушаемый док, в котором размещается и транспортируется поднятое со дна судно. Поворотные лапы захвата, количество, размеры и форма которых соответствуют поднимаемому судну, разнесены на раме по длине поднимаемого судна в соответствии с распределением его весовых нагрузок, что обеспечивает сохранность корпуса поднимаемого судна. Поворотные лапы приводятся в движение индивидуально или совместно в любом сочетании с помощью электрогидравлического привода, включающего электродвигатель, насос и рабочие гидроцилиндры, соединяющие поворотные лапы с рамой захватного устройства. Охват корпуса затонувшего судна осуществляется поворотными лапами без его обжатия, путем заглубления лап под его корпусом, лежащим на грунте. Захватное устройство, выполненное на общей раме, позволяет изменять продольный и поперечный углы наклона захвата вместе со свободно лежащим в нем судном после смыкания лап, не создавая дополнительных нагрузок на его корпус и подъемные устройства при отрыве корпуса судна от грунта. Это позволяет устранить весьма неприятный «эффект присоса» корпуса судна к грунту и исключить его повреждение, что особенно важно при подъеме атомных подводных лодок, требующем гарантирования сохранности атомного реактора. Для возможности подъема затонувших судов с различных, в том числе больших глубин, грузовые лебедки грузоподъемных устройств выполнены с перематывающими барабанами с возможностью наращивания грузовых канатов до необходимой длины путем соединения их с помощью замков последовательно с канатами нескольких канатных катушек, расположенных в трюмах подъемных средств. С целью исключения из нагрузки грузоподъемных устройств силы тяжести захватного устройства, его рама и поворотные лапы выполняются из полых коробчатых элементов, обеспечивающих нулевую или положительную плавучесть захвата, устраняемую при опускании под воду путем принятия водяного балласта, высвобождаемого при подъеме затонувшего судна.
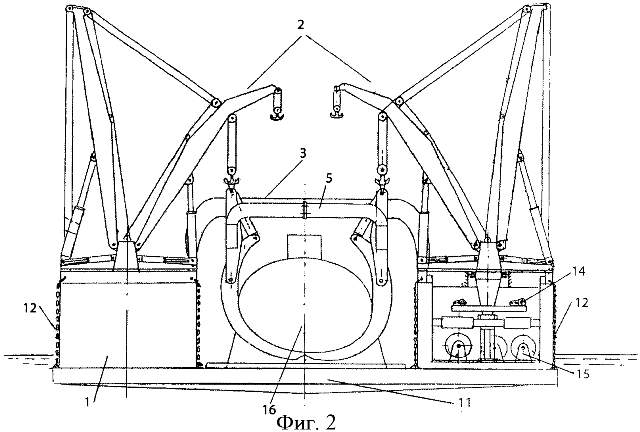
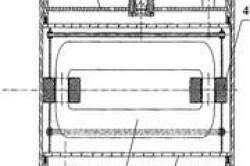
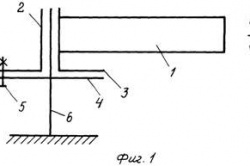
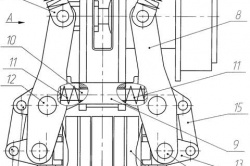
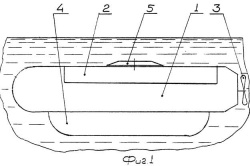
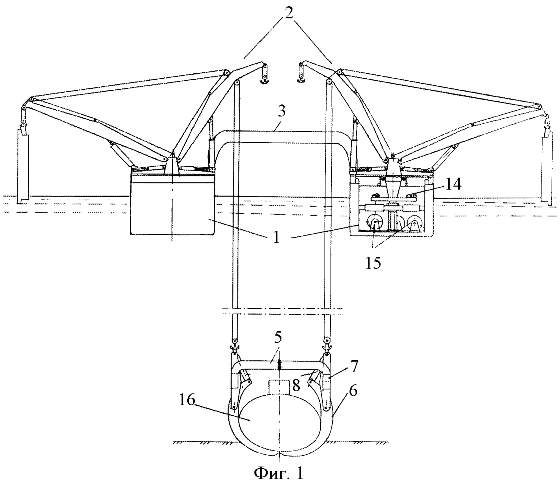
На фиг.1 изображен плавучий судоподъемный комплекс при захвате и подъеме затонувшей подводной лодки (поперечный разрез), на фиг.2, 3, 4 - судоподъемный модульный комплекс-док (СМКД) с транспортируемой подводной лодкой: поперечный разрез - фиг.2, боковой вид - фиг.3, вид сверху - фиг.4. На фиг.5 и 6 показаны носовая, кормовая и днищевые приставки в транспортном положении: боковой вид - фиг.5, вид сверху - фиг.6.
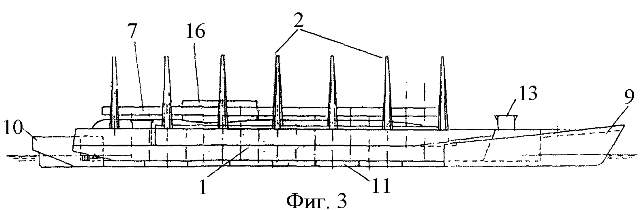
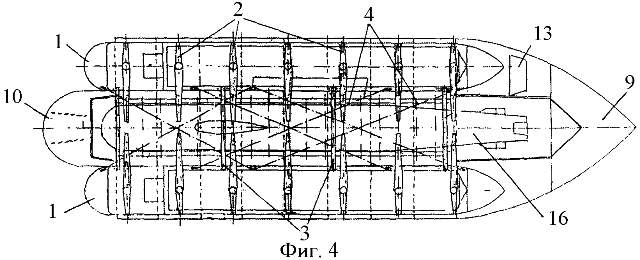
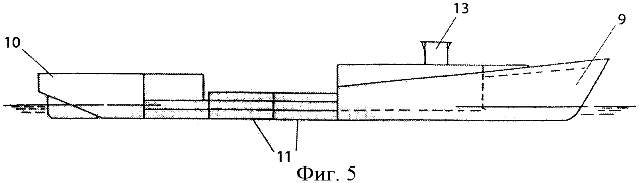
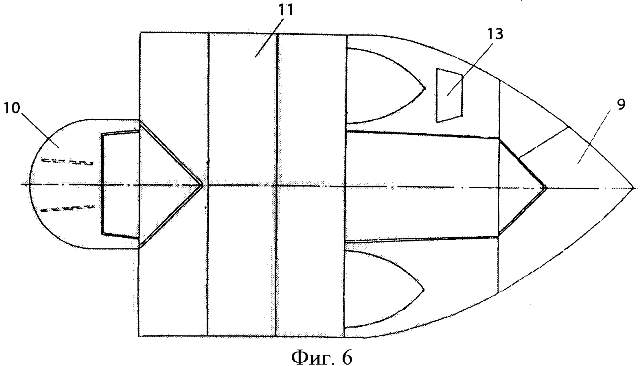
Патентуемый комплекс включает в себя следующие составные части: два самоходных плавучих средства 1 с установленными на каждом несколькими грузоподъемными устройствами 2, поперечные шарнирные балки 3 и продольные растяжки 4, соединяющие корпуса двух подъемных средств в единый комплекс, автоматическое захватное устройство 5 с поворотными управляемыми лапами 6, смонтированными на общей раме 7, приводимыми в движение индивидуально или совместно с помощью электрогидравлического привода, включающего: электродвигатель, насос и рабочие гидроцилиндры 8, соединяющие поворотные лапы 6 с рамой 7, носовая 9 и кормовая 10 приставки - обтекатели, состыковываемые соответственно с носовыми и кормовыми оконечностями корпусов плавучих подъемных средств 1, днищевые приставки - балластирующиеся понтоны 11 в виде барж-площадок, подводимых под днища корпусов подъемных средств 1 и соединяемых с ними с помощью цепей с талрепами 12, центральный пост управления в ходовой рубке 13, из которого управляется работа комплекса по подъему и транспортированию затонувшего судна, грузовые лебедки с перематывающими барабанами 14, соединяемые с канатными катушками 15, расположенными в трюмах подъемных средств 1.
Работа патентуемого комплекса осуществляется следующим образом.
К месту подъема затонувшего судна (ЗС) оперативно доставляются модули СПМКД: самоходом - два основных модуля - плавучие подъемные средства большой грузоподъемности 1, буксируется комплект модулей в составе носовой, кормовой и днищевой приставок (фиг.5). На месте подъема ЗС два судна - судоподъемные средства с грузовыми устройствами, устанавливаются параллельно друг другу вдоль затонувшего судна (ЗС) на своих якорях (обычных или плавучих) или швартовых от вспомогательных судов. С помощью подъемных устройств 2 шарнирно присоединяются поперечные соединительные балки 3 и продольные растяжки 4, образуя единый судоподъемный комплекс. Затем собирается и навешивается на гаке грузовых устройств 2 автоматическое захватное устройство 5 с поворотными приводными с помощью гидроцилиндров 8 лапами 6. На канатных полиспастах грузовых устройств 2, работающих синхронно, захватное устройство 5 опускается в раскрытом виде к затонувшему судну (ЗС) и устанавливается над ним на грунт, после чего включается механизм замыкания лап - гидроцилиндры 8. При замыкании лап затонувшее судно (ЗС), лежащее на грунте, охватывается лапами по всей его длине без обжатия корпуса. В процессе замыкания поворотные лапы внедряются в грунт под днищем ЗС, не воздействуя на его корпус. При этом лапы захвата проделывают в грунте под ЗС поперечные траншеи, существенно уменьшая «эффект присоса» корпуса ЗС к грунту. Полное устранение «эффекта присоса» осуществляется на первой фазе подъема путем изменения продольного и поперечного углов наклона захватного устройства со свободно лежащим в нем ЗС. Наведение захватного устройства (ЗУ) на затонувшее судно (ЗС) и процесс замыкания лап управляются оператором по телемонитору с центрального поста управления или из подводного батискафа. Первый этап наводки ЗУ на ЗС осуществляется путем подвижек судоподъемного модульного комплекса на якорях или швартовых от вспомогательных судов. Второй, более точный, этап наведения раскрытого ЗУ осуществляется с помощью грузовых устройств по командам оператора из батискафа. После замыкания лап грузовые лебедки включаются на подъем с разными скоростями, обеспечивая изменение угла наклона захвата и устраняя тем самым «эффект присоса». При этом корпус ЗС свободно лежит в ложементах-лапах ЗУ и дополнительных нагрузок не испытывает, что исключает его разлом. После подъема ЗС на некоторую высоту над дном судоподъемный комплекс устанавливается носом против волн на плавучих якорях и продолжается подъем затонувшего судна на поверхность. По окончании подъема ЗС под днища основных судовых модулей подводятся балластирующиеся понтоны-модули, принайтовывающиеся к корпусам подъемных средств с помощью цепей 12. Присоединяются носовая 9 и кормовая 10 плавучие приставки-обтекатели, образующие вместе с двумя судами судоподъемный модульный комплекс-док с необходимыми мореходными качествами. Под ЗС подводятся кильблоки и откачивается вода из внутреннего замкнутого пространства дока, после чего поднятое судно транспортируется к месту ремонта или утилизации при минимальной осадке дока, что позволяет заводить его на мелководную акваторию завода. Управление СПМКД при подъеме и транспортировке затонувшего судна осуществляется с центрального поста 13 на носовой приставке 9.
Эффективность реализации патентуемого комплекса для подъема затонувших подводных лодок и других судов определяет:
- возможность оперативной доставки модулей СПМКД в различные водные районы для устранения последствий аварий и катастроф и быстрой подготовки комплекса к работе по подъему судна;
- возможность подъема подводных лодок (прежде всего атомных) с различных, в том числе достаточно больших глубин, с гарантированной сохранностью корпуса поднимаемых АПЛ и их атомных реакторов в том состоянии, в котором они находятся;
- отсутствие необходимости выполнения трудоемких и дорогостоящих подводно-технических работ и привлечение водолазов-глубоководников для застропки затонувшего судна;
- минимальная трудоемкость выполнения судоподъемных работ;
- возможность многократного использования СПМКД для последующего подъема затонувших подводных лодок и других судов;
- многофункциональность СПМКД: использование для подъема затонувших подлодок и других судов, для транспортирования аварийных судов и других крупногабаритных и крупнотоннажных объектов, для докования и ремонта судов, возможность использования как всего комплекса в целом, так и его основных модулей по отдельности, в том числе на внутренних водных путях для подъема судов и перегрузки тяжеловесных и крупногабаритных изделий.