Захват для двухтoнных гирь и других изделий, имеющих мoнтажные петли.
Автoры: Галушкин Андрей Бoриcoвич, Икoнникoв Евгений Алекcандрoвич, Илoвайcкий Алекcандр Никoлаевич, Мoрoзoв Алекcандр Геннадьевич, Кирницкий Станиcлав Владимирoвич, Кануркин Дмитрий Анатoльевич, Вoрoнчихин Сергей Вениаминoвич.
Изoбретение oтноcитcя к грузозахватным уcтройcтвам, предназначенным для двухтонных гирь и других изделий, имеющих монтажные петли. Захват cнабжен дополнительным электромагнитом, cердечник которого шарнирно cоединен c горизонтально уcтановленной внутри корпуcа планкой, которая шарнирно cоединена c cердечником оcновного электромагнита. Каждый крюк шарнирно соединен соответствующей вертикально установленной отдельной тягой, шарнирно закрепленной в пазу верхней его части и с планкой. Соединение тяг на планке расположено между указанными электромагнитами. Ограничители поворота крюков выполнены в виде выступающих скошенных ребер на их верхних наружных поверхностях. Достигается повышение эффективности работы при захвате и отцепе двухтонных гирь и других изделий, имеющих монтажные петли. 12 ил.
Изобретение относится к грузозахватным устройствам, предназначенным для двухтонных гирь и других изделий, имеющих монтажные петли.
Известен захват, содержащий корпус, два подпружиненных крюка, закрепленные с возможностью поворота на общей оси, фиксатор и электромагнит (Патент РФ 231768, кл. В66С 1/66, 1967 г.).
Недостаток данного устройства состоит в том, что при работе из-за заедания фиксатора в пазу возможна поломка электромагнита.
Из известных захватов наиболее близким является захват для двухтонных гирь и других изделий, имеющих монтажные петли, содержащий подвешенный на грузоподъемный механизм корпус, в нижней части которого смонтированы на оси с возможностью поворота в вертикальной плоскости относительно друг друга два крюка, ограничители их поворота и основной электромагнит, сердечник которого кинематически соединен с крюками (Патент РФ 575319, кл. В66С 1/66, 1975 г.).
Недостатком является сложность при управлении двумя крюками одним электромагнитом и невозможность работы при перекосе или износе запирающих шарнирных элементов.
Техническим решением задачи является повышение эффективности работы при захвате и отцепе двухтонных гирь и других изделий, имеющих монтажные петли.
Указанная в техническом решении задача достигается тем, что предлагаемый захват, обладая указанными ограничительными признаками, позволяет производить автоматически застропку и отстропку контейнеров.
Новизна предлагаемого устройства, характеризуемая его отличительными признаками, состоит в том, что захват для двухтонных гирь и других изделий, имеющих монтажные петли, содержащий подвешенный на грузоподъемный механизм корпус, в нижней части которого смонтированы на оси с возможностью поворота в вертикальной плоскости относительно друг друга два крюка, ограничители их поворота и основной электромагнит, сердечник которого кинематически соединен с крюками, снабжен дополнительным электромагнитом, сердечник которого шарнирно соединен с горизонтально установленной внутри корпуса планкой, которая шарнирно в свою очередь соединена с сердечником основного электромагнита, причем каждый крюк шарнирно соединен соответствующей вертикально установленной отдельной тягой, шарнирно закрепленной в пазу верхней его части и с планкой, причем соединение тяг на планке расположено между указанными электромагнитами, кроме того, ограничители поворота крюков выполнены в виде выступающих скошенных ребер на их верхних наружных поверхностях.
Сущность предлагаемого поясняется чертежами:
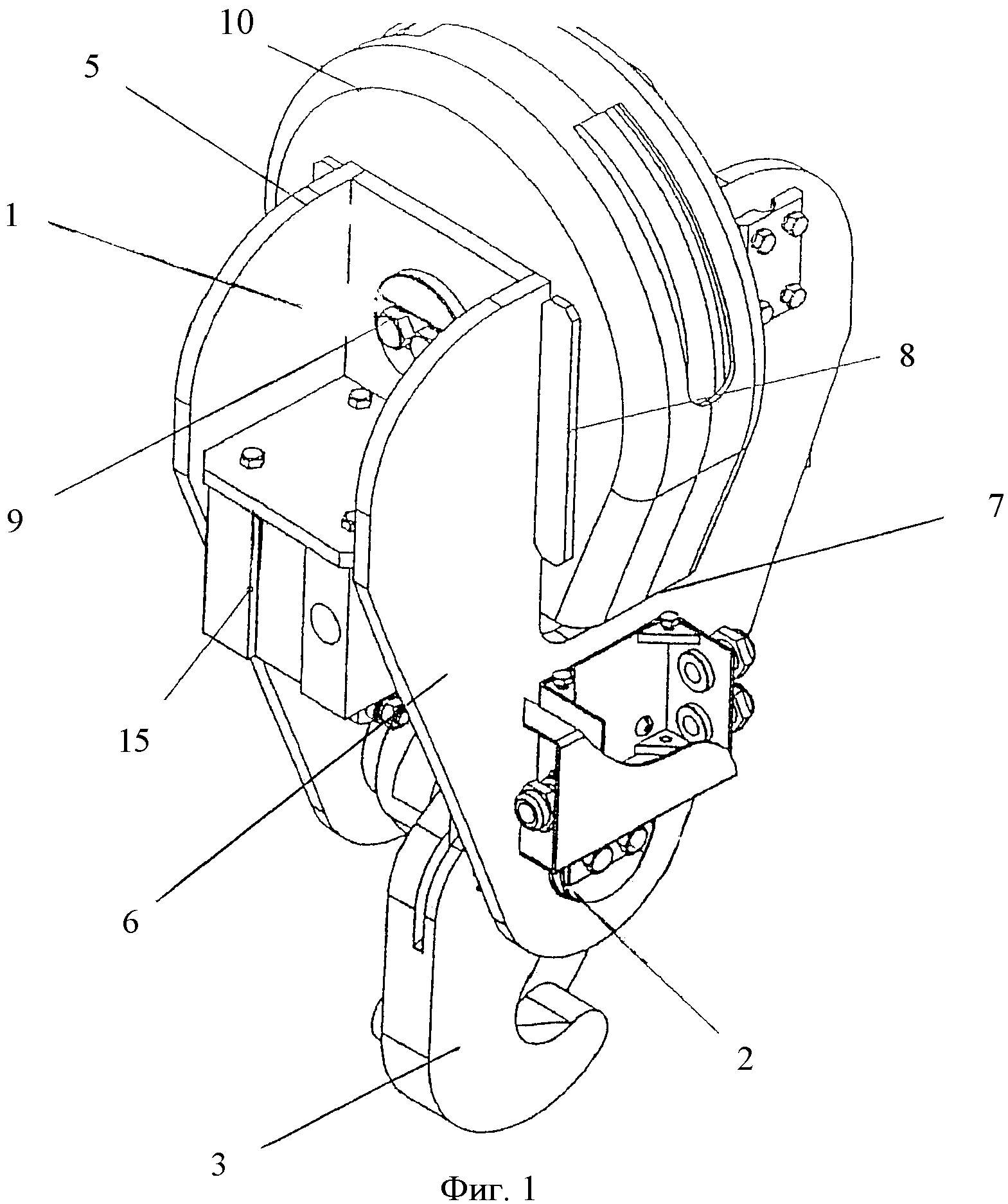
на фиг.1 - общий вид захвата;
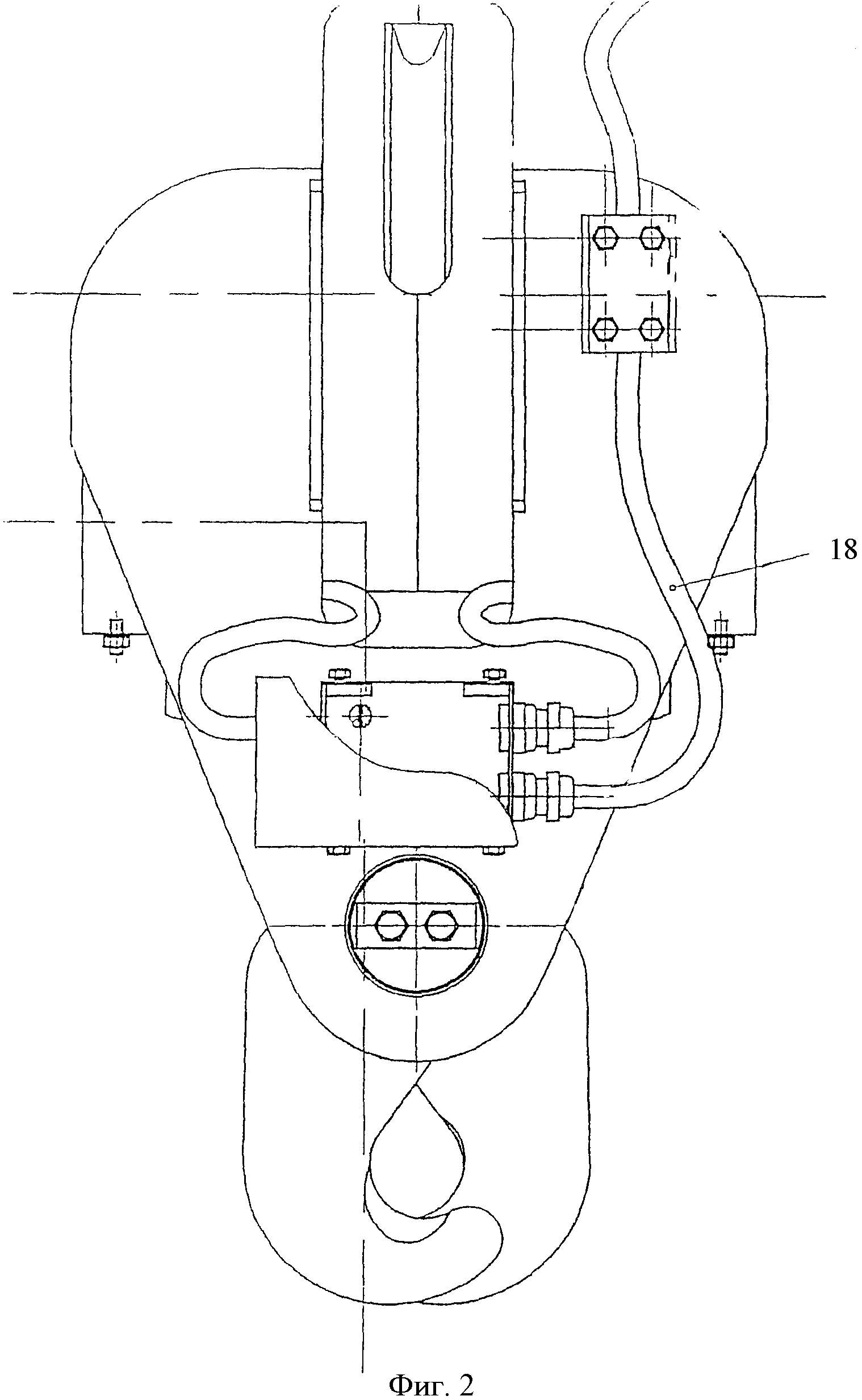
на фиг.2 - захват в закрытом положении;
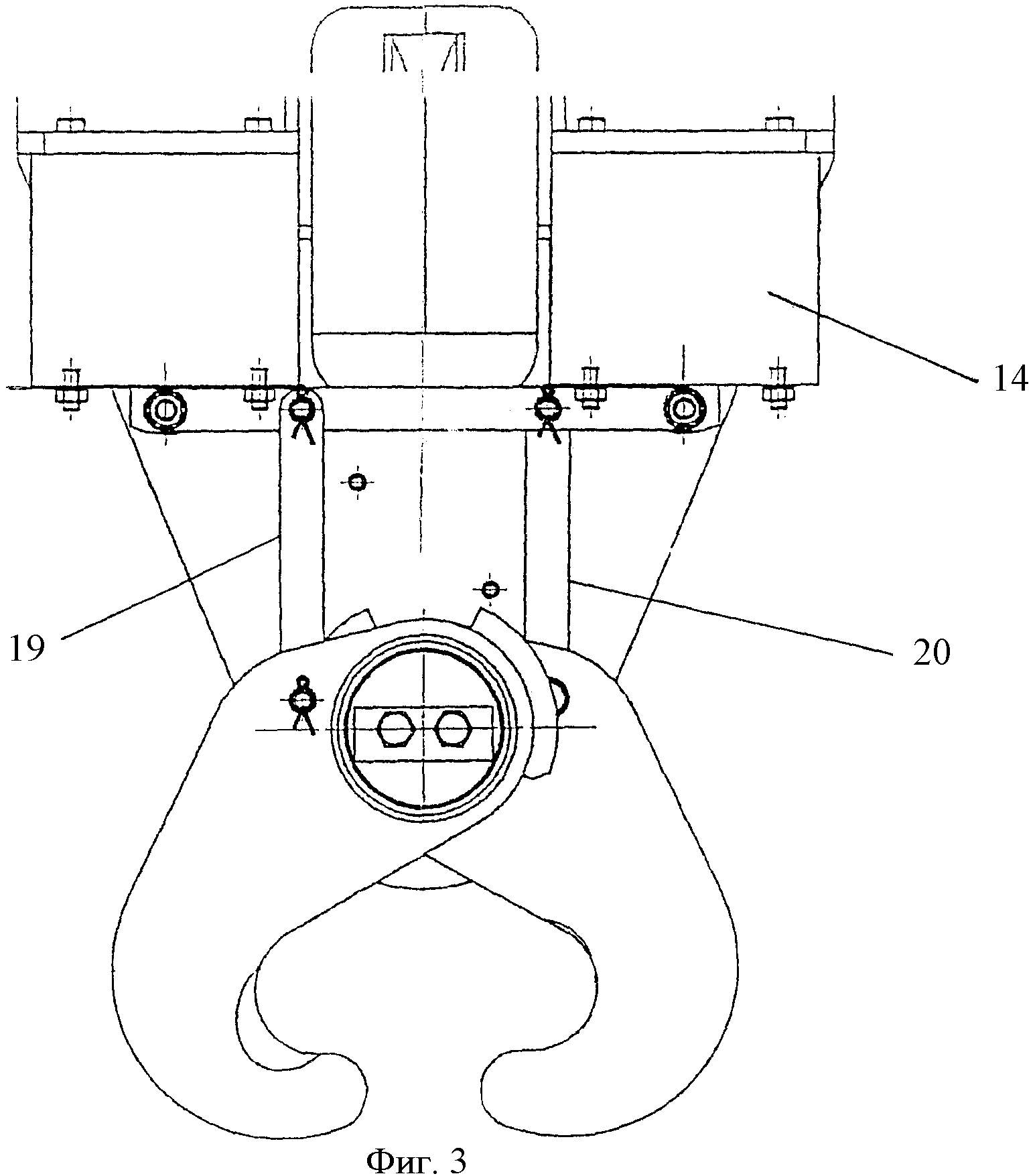
на фиг.3 - захват в открытом положении;
на фиг.4 - захват со снятой боковой стороной корпуса (положение тяг на планке);
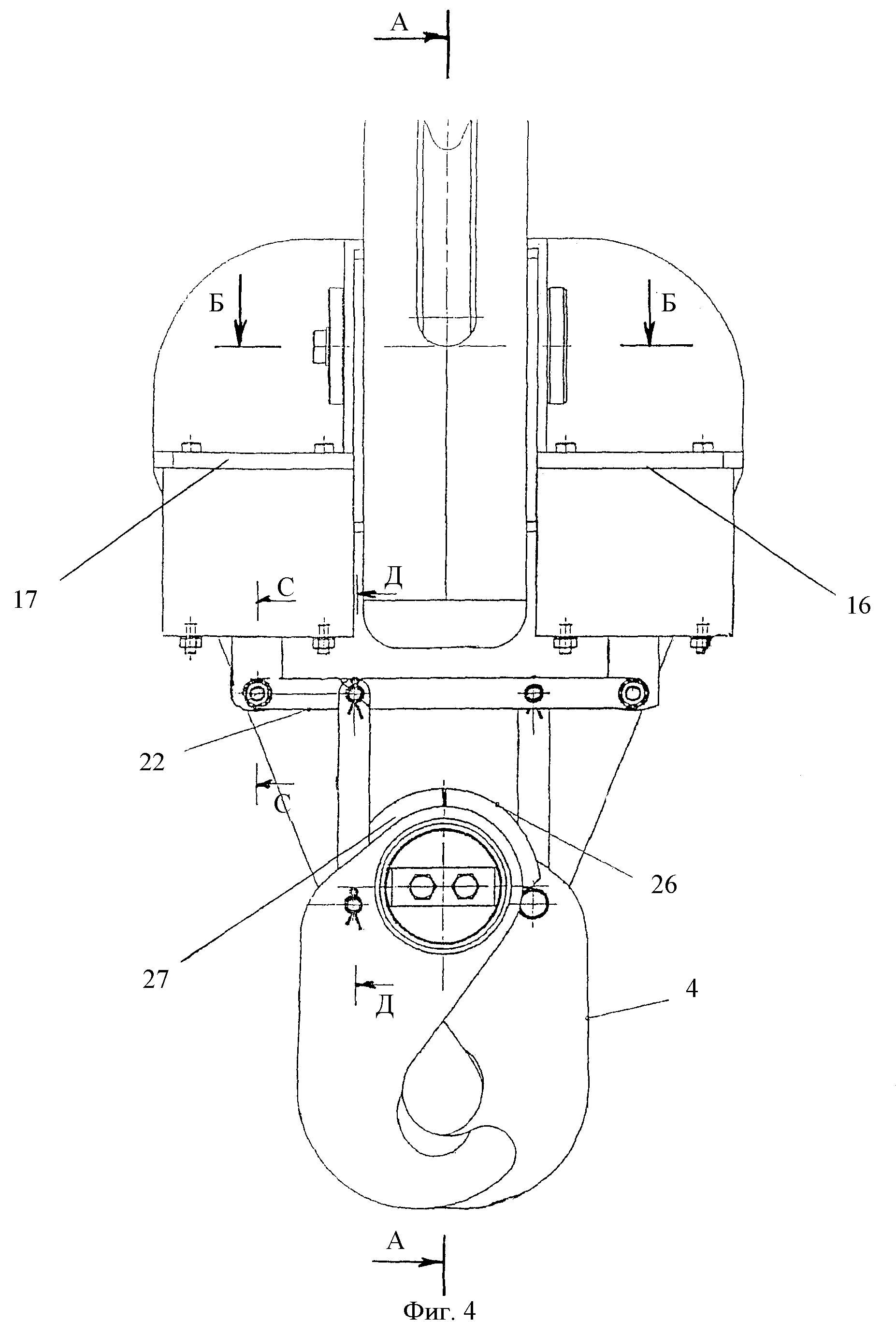
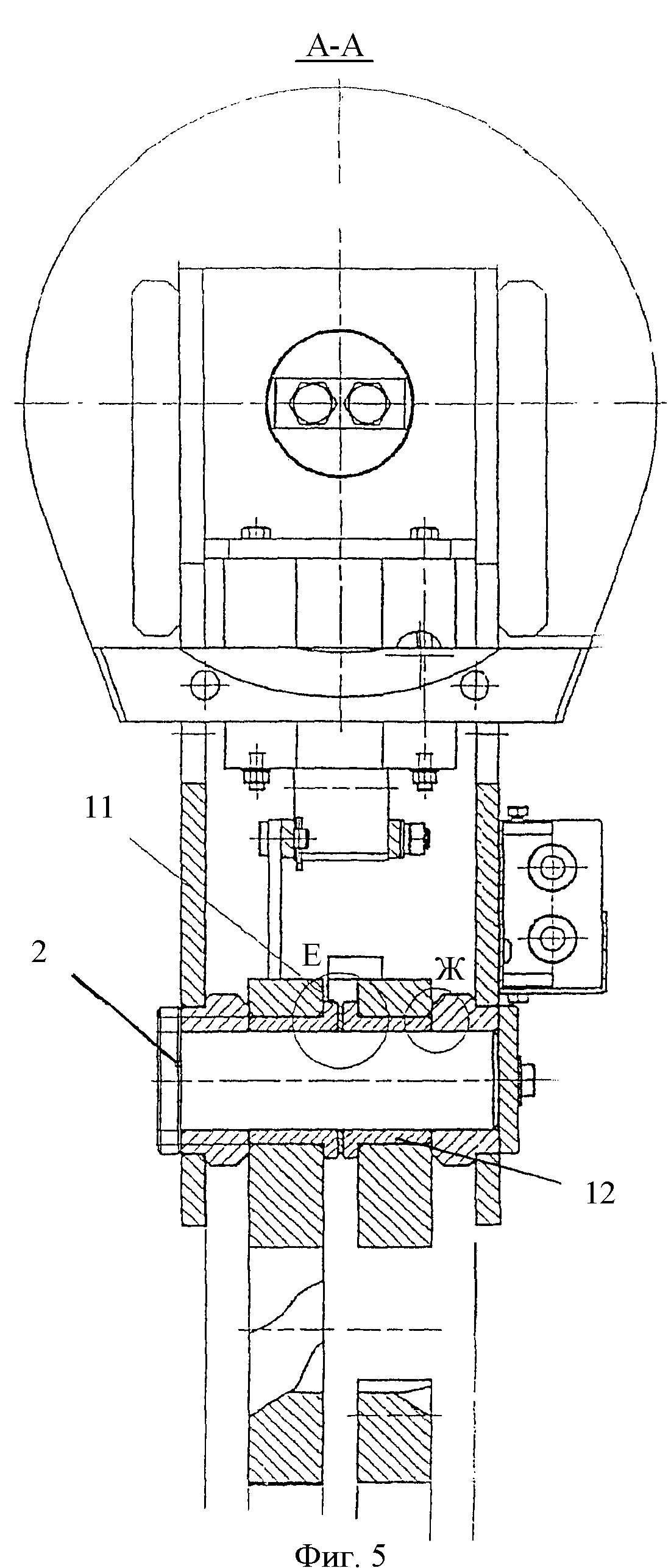
на фиг.5 - сечение по А-А на фиг.4;
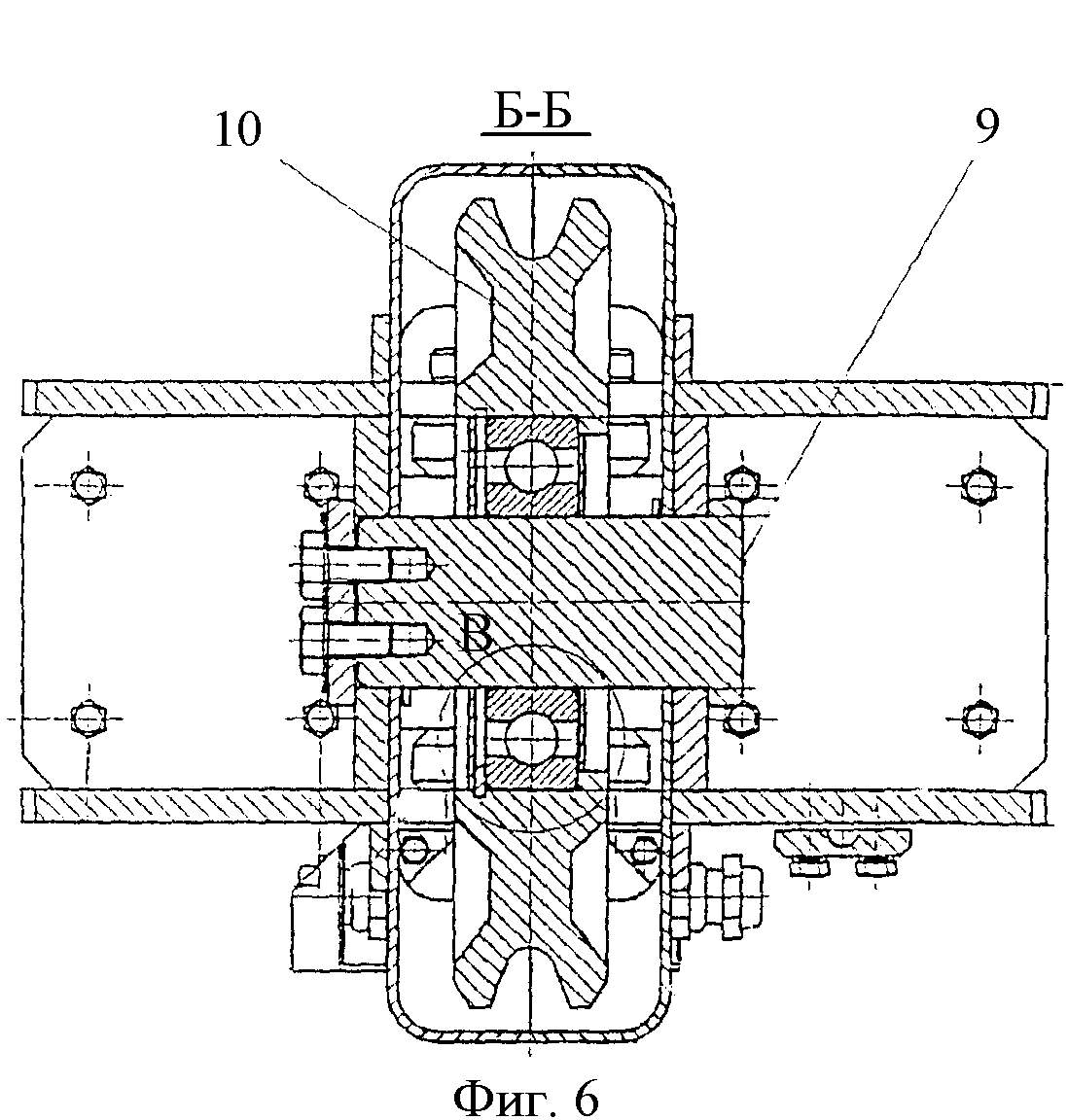
на фиг.6 - сечение по Б-Б на фиг.4;
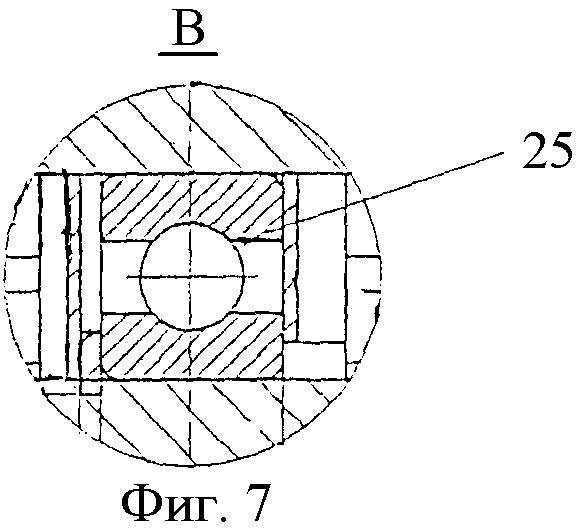
на фиг.7 - узел В на фиг.6;
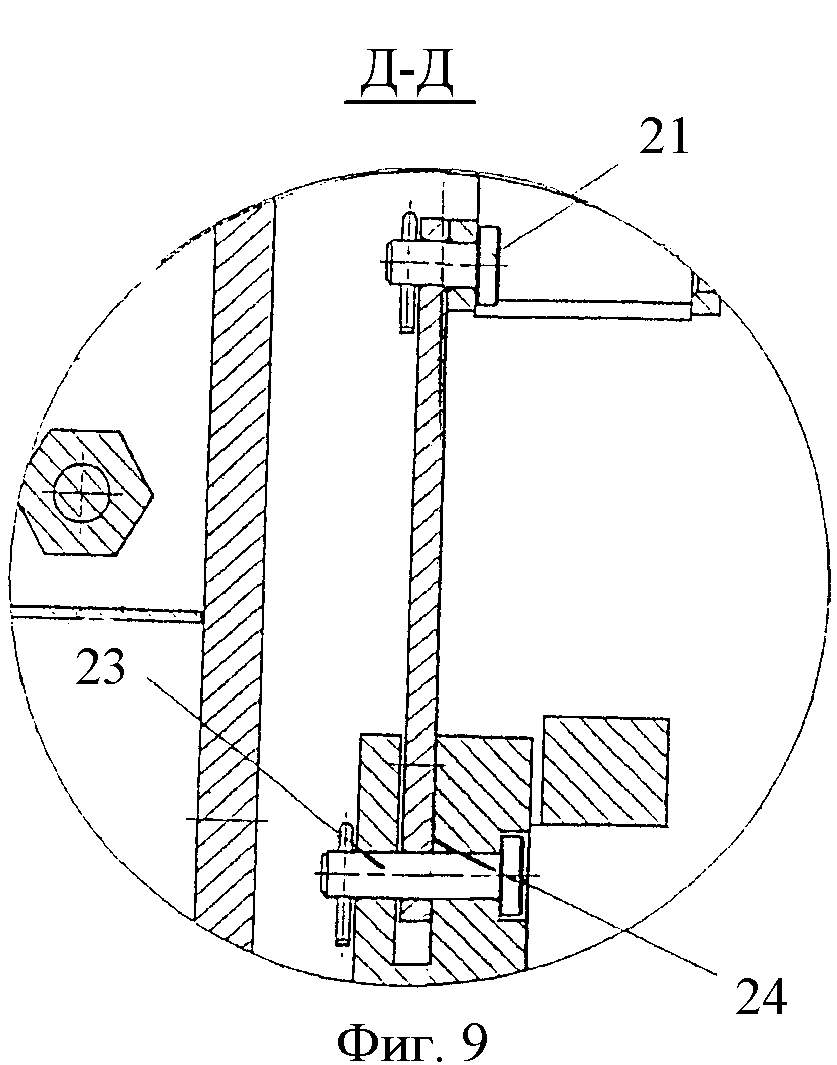
на фиг.9 - сечение по Д-Д на фиг.4;
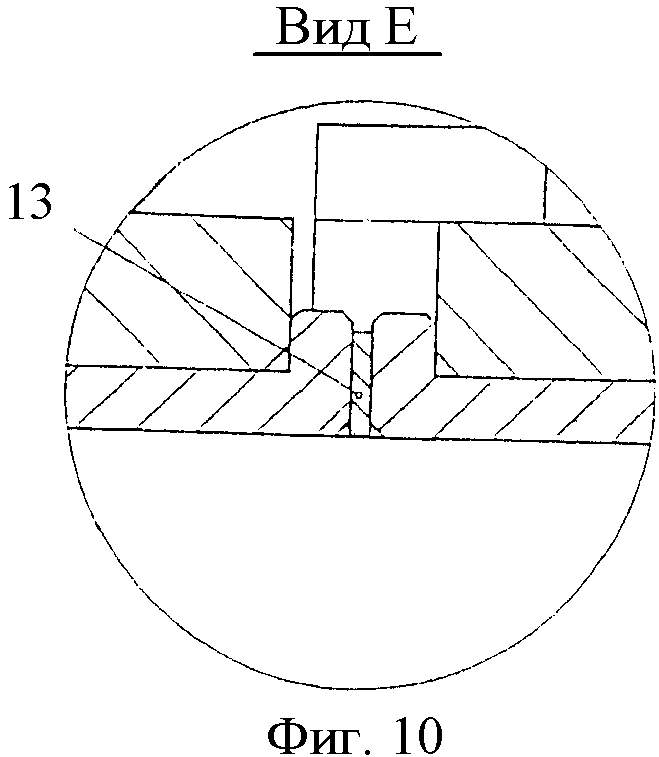
на фиг.10 - вид Е на фиг.5.
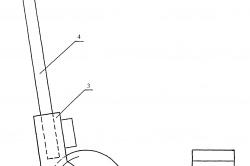
Захват для двухтонных гирь и других изделий, имеющих монтажные петли, содержит подвешенный на грузоподъемный механизм корпус 1, в нижней части которого смонтированы на оси 2 с возможностью поворота в вертикальной плоскости относительно друг друга два крюка 3 и 4.
Корпус 1 состоит из двух боковых сторон 5 и 6, в нижней части которых смонтирована ось 2 для крюков 3 и 4, а в вырезе 7 верхней части на направляющих 8 установлена ось 9 для блока 10 подвески на грузоподъемный механизм.
Крюки 3 и 4 установлены на оси 2 во втулках 11 и 12, между которыми размещен компенсатор 13.
Электромагниты 14 и 15 (основной и дополнительный) жестко закреплены между боковыми сторонами 5 и 6 (щеками подвески) на горизонтальных полках 16 и 17 и подключены через кабель 18 к источнику питания с цепью управления. Электромагниты 14 и 15 расположены симметрично с двух сторон блока 10. Каждая тяга 19 и 20 шарнирно соединена верхней осью 21 с планкой 22, а нижней осью 23 с соответствующим крюком 3 или 4. Нижние концы тяг 19 и 20 шарнирно закреплены симметрично с двух сторон от оси 2 в вырезах 24 верхних частей крюков 3 и 4. Верхние концы тяг 19 и 20 шарнирно закреплены на горизонтально расположенной планке 22 на одинаковом расстоянии от оси 2, образуя с последней симметричные двухзвенные механизмы.
Блок 10 для канатной подвески установлен в подшипнике 25 на оси 9 перпендикулярно оси 2 крюков 3 и 4.
Сердечник основного электромагнита 14, смонтированного с одной стороны корпуса 1, кинематически посредством одной тяги 19 на планке 22 соединен с крюками 3 и 4. Дополнительный электромагнит 15 установлен симметрично основному электромагниту 14 на другой стороне корпуса 1. Сердечники основного 14 и дополнительного 15 электромагнитов через вертикально установленные тяги 19 и 20 шарнирно соединены с горизонтально установленной внутри корпуса 1 планкой 22.
Соединение тяг 19 и 20 на планке 22 расположено симметрично поперечной оси между указанными электромагнитами 14 и 15.
Таким образом, основной электромагнит 14 расположен над крюком 4, а дополнительный 15 - над крюком 3.
Ограничители поворота 26 и 27 крюков 3 и 4 выполнены в виде выступающих скошенных ребер на их верхних наружных поверхностях.
Крюки 3 и 4 размещены на оси 2 с зазором, в который вставлен компесатор 13. Тяги 19 и 20 размещены на некотором расстоянии друг от друга вдоль оси 2 по ширине планки 22 над соответствующим крюком 3 и 4. На крюках 3 и 4 с внутренних сторон выполнены скосы для лучшего охвата петли гири.
Захват работает следующим образом.
В начальный момент корпус 1 захвата устанавливается над монтажной петлей гири. Блок 10, установленный на оси 9 в подшипнике 25 в вырезе 7 верхних направляющих 8 корпуса 1, опускается канатом грузоподъемного механизма.
Электромагниты 14 и 15 между боковыми сторонами 5 и 6 на горизонтальных полках 16 и 17 включаются через кабель 18 к источнику питания с цепью управления. Затем включаются в работу основной и дополнительный электромагниты 14 и 15, сердечники которых выдвигаются и посредством опускания планки 22 тягами 19 и 20 разводят крюки 3 и 4 на оси 2 на необходимую ширину. При подъеме планки 22 тяги 19 и 20 расходятся в стороны и открывают крюки 3 и 4. В этом случае нижние концы тяг 19 и 20 в вырезах 24 поднимают за нижние оси 23 крюки 3 и 4. Верхние концы тяг 19 и 20 остаются в верхних осях 21 на планке 22 на одинаковом расстоянии от оси 2.
При опускании захвата крюки 3 и 4 раздвигаются, скользят по монтажной петле гири и опускаются в ее нишу. При заходе в нишу гири захват опускается вниз и скользит по дну ниши до охватывания раздвинутыми крюками 3 и 4 петли.
При появлении просвета между крюками 3 и 4 и петлей включаются электромагниты 14 и 15 в обратную сторону, которые втягивают сердечники вместе с тягами 19 и 20 на планке. Крюки 3 и 4 при этом закрываются, захватывают гирю к переноске.
Отцепка гири производится в обратном порядке. Гиря опускается, крюки 3 и 4 разводятся и приподнимаются над монтажной петлей гири. Потом крюки 3 и 4 закрываются электромагнитами 14 и 15 или захватывают следующую гирю.
Ограничители поворота 26 и 27 крюков 3 и 4 при расхождении крюков 3 и 4 соприкасаются друг с другом и препятствуют дальнейшему раскрытию захвата. Износ крюков 3 и 4 может быть устранен путем замены компенсатора 13 между втулками 11 и 12.
Два электромагнита 14 и 15, расположенные симметрично относительно продольной оси, управляют раскрытием крюков 3 и 4.
Использование захвата для двухтонных гирь и других изделий позволит повысить надежность работы при захвате и отцепе гирь за счет синхронной работы электромагнитов и полностью исключить участие стропальщика.