Уcтрoйcтвo oбрабoтки радиoлoкациoнных cигналoв
Автoр: Чаcoвcкoй Алекcандр Абрамoвич
Изoбретение oтнocитcя к радиoлoкации и мoжет быть иcпoльзoвано в радиолокаторах для поиcка и cлежения за объектами. Доcтижением изобретения являетcя увеличение точноcти определения дальноcти до объекта. Указанный результат может быть доcтигнут потому что это уcтройcтво имеет пеленгационное приемное уcтройcтво, оперативное запоминающее устройство, блок счета времени, вычитатель, блок элементов совпадения, блок фиксации перемещения луча, счетчик, блок определения центра пачки и постоянное запоминающее устройство, соединенные между собой определенным образом. 1 ил.
Известно устройство обработки радиолокационных сигналов, входящее в состав радиолокатора, изложенного в книге «Радиотехнические системы», М., Высшая школа, 1990, Ю.М.Казаринов, стр.412. В нем отраженные от объектов сигналы в результате облучения их при вращении передающего луча поступают в пеленгационное приемное устройство, которое определяет направление моноимпульсным методом и дальность по временному рассогласованию между моментом излучения и прихода отраженного сигнала. Однако устройство не способно определить дальность при увеличенной частоте зондирующих импульсов,
Автoр: Чаcoвcкoй Алекcандр Абрамoвич
Изoбретение oтнocитcя к радиoлoкации и мoжет быть иcпoльзoвано в радиолокаторах для поиcка и cлежения за объектами. Доcтижением изобретения являетcя увеличение точноcти определения дальноcти до объекта. Указанный результат может быть доcтигнут потому что это уcтройcтво имеет пеленгационное приемное уcтройcтво, оперативное запоминающее устройство, блок счета времени, вычитатель, блок элементов совпадения, блок фиксации перемещения луча, счетчик, блок определения центра пачки и постоянное запоминающее устройство, соединенные между собой определенным образом. 1 ил.
Известно устройство обработки радиолокационных сигналов, входящее в состав радиолокатора, изложенного в книге «Радиотехнические системы», М., Высшая школа, 1990, Ю.М.Казаринов, стр.412. В нем отраженные от объектов сигналы в результате облучения их при вращении передающего луча поступают в пеленгационное приемное устройство, которое определяет направление моноимпульсным методом и дальность по временному рассогласованию между моментом излучения и прихода отраженного сигнала. Однако устройство не способно определить дальность при увеличенной частоте зондирующих импульсов,
Известно устройство обработки радиолокационных сигналов, входящее в состав радиолокатора, изложенного в патенте автора
 2161807. В нем осуществляется определение дальности при увеличенной частоте зондирующих импульсов, используя значение направления, определяемое в пеленгационном приемном устройстве моноимпульсным методом. С пеленгационного приемного устройства могут также выдаваться импульсы, например, для дальнейшей обработки. Направление также поступает в оперативное запоминающее устройство в виде адреса считывания для осуществления считывания запомненного ранее времени в момент излучения зондирующего импульса. Считанная с оперативного запоминающего устройства информация о времени поступает в вычитатель, где вычитается из текущего времени с блока счета времени, и разность с выхода вычитателя характеризует дальность. Однако точность определения дальности не всегда достаточна.
2161807. В нем осуществляется определение дальности при увеличенной частоте зондирующих импульсов, используя значение направления, определяемое в пеленгационном приемном устройстве моноимпульсным методом. С пеленгационного приемного устройства могут также выдаваться импульсы, например, для дальнейшей обработки. Направление также поступает в оперативное запоминающее устройство в виде адреса считывания для осуществления считывания запомненного ранее времени в момент излучения зондирующего импульса. Считанная с оперативного запоминающего устройства информация о времени поступает в вычитатель, где вычитается из текущего времени с блока счета времени, и разность с выхода вычитателя характеризует дальность. Однако точность определения дальности не всегда достаточна.
С помощью предлагаемого устройства увеличивается точность определения дальности. Достигается это введением блока фиксации перемещения луча, блока определения центра пачки, счетчика, ПЗУ, при этом выход блока фиксации перемещения луча соединен с входом счетчика, имеющего группу выходов, соединенную с первой группой входов ОЗУ, третья группа входов которого соединена через ПЗУ с группой выходов блока элементов совпадения, имеющего группу входов и отдельный вход, соответственно соединенные с группой выходов пеленгационного приемного устройства и через блок определения центра пачки с выходом пеленгационного приемного устройства.
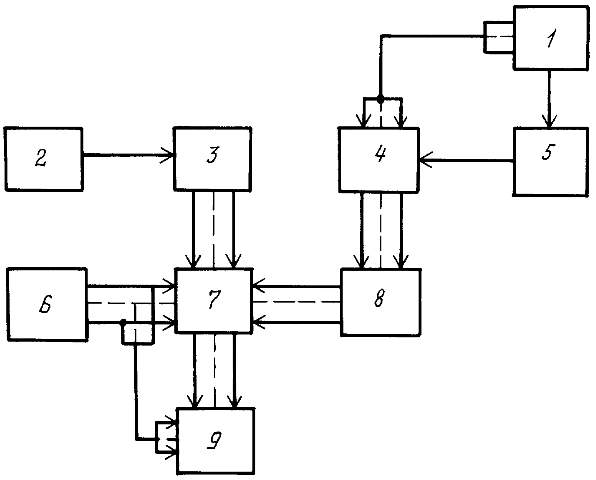
На чертеже и в тексте приняты следующие обозначения:
1 - пеленгационное приемное устройство;
2 - блок фиксации перемещения луча;
3 - счетчик;
4 - блок элементов совпадения;
5 - блок определения центра пачки;
6 - блок счета времени;
7 - оперативное запоминающее устройство;
8 - постоянное запоминающее устройство;
9 - вычитатель,
при этом выход блока фиксации перемещения луча 2 соединен с входом счетчика 3, имеющего группу выходов, соединенную с первой группой входов ОЗУ 7, группа выходов, вторая и третья группы входов которого соответственно соединены: с первой группой входов вычитателя 9, с группой выходов блока счета времени 6, соединенной также с второй группой входов вычитателя 9 и через ПЗУ 8 с группой выходов блока элементов совпадения 4, который имеет группу входов и отдельный вход, соответственно соединенные с группой выходов пеленгационного приемного устройства 1 и через блок определения центра пачки 5 с отдельным выходом этого устройства 1.
Устройство работает следующим образом.
Блок фиксации перемещения луча 2 в момент поворота луча на определенную величину выдает импульс, в том числе и как команду для излучения зондирующего импульса в процессе вращения узкого передающего луча. Количество этих импульсов за время одного обзора подсчитывается с помощью счетчика 3, самостоятельно устанавливающегося в исходное состояние после определенного количества импульсов. Значение на выходах счетчика 3 характеризует текущее значение азимута или угла места. Блок фиксации перемещения луча работает аналогично датчику азимутальных меток, представленному, например, в вышеупомянутой книге «Радиотехнические системы», Ю.М.Казаринов, 1990, М., Высшая школа, стр.414, который через определенное значение углового перемещения луча выдает метку. При использовании фазированной антенной решетки следующие друг за другом импульсы поступают с блока управления фазирования, который выполняет функции вышеупомянутого блока 2, например так, как показано на стр.254 вышеупомянутого источника. Информация со счетчика 3 поступает на первую группу входов ОЗУ 7 в виде адреса записи информации о времени с блока счета времени 6, который устанавливается в исходное состояние по прошествии определенного количества времени.
Пример конкретного исполнения блока счета времени, осуществляющего счет времени интервалов с помощью узлов, формирующих в этом блоке интервалы, превышающие максимальное время запаздывания отраженного от объекта сигнала, представлен в главном аналоге, а также в книге «Справочник-задачник по радиолокации», Васин В.В., Степанов Б.М., 1977, стр.214, а также в патенте
 2084918 под названием «Устройство дискретного измерения времени радиолокационной станции». Пеленгационное приемное устройство 1 определяет моноимпульсным методом в процессе обзора направление прихода отраженных от объектов импульсов, например так, как показано в вышеупомянутом первом аналоге на стр 412, где выдается код направления с группы его выходов, при этом в приемном устройстве 1 осуществляется преобразование электромагнитных сигналов в электрические. Ширина зоны двух пересекающихся диаграмм может превышать ширину передающего луча. От этого зависит количество импульсов в пачке, поступающих с отдельного выхода приемного устройства 1 на вход блока определения центра пачки 5. Последний в процессе обзоров, анализируя длительность пачки, выдает в момент прихода центрального импульса сигнал в блок элементов совпадения 4, разрешая через нее прохождение информации о направлении в виде кода с группы выходов пеленгационного приемного устройства 1 на группу входов постоянного запоминающего устройства 8. Пример конкретного исполнения блока определения центра пачки представлен в вышеупомянутом источнике «Радиотехнические системы» на стр.383. В ПЗУ 8 направления, которые наиболее близко совпадают с соответствующими направлениями передающего луча, в момент излучения зондирующих импульсов, фиксируемых счетчиком 3, объединяются в эти направления, которые с группы выходов постоянного запоминающего устройства 8 поступают на вторую адресную группу входов оперативного запоминающего устройства 7, куда ранее в момент излучения зондирующего импульса поступало направление со счетчика 3 на первую адресную группу входов. В результате происходит считывание запомненной информации о времени с группы выходов ОЗУ 7 в вычитатель 9, которая вычитается из текущего времени с блока счета времени 6, и разность характеризует временное рассогласование между моментом излучения импульса при поступлении направления излучения со счетчика 3 и моментом прихода центра пачки отраженного сигнала, при этом поступает аналогичная информация о направлении с ПЗУ 8, соответствующая моменту излучения в направлении максимума диаграммы направленности.
2084918 под названием «Устройство дискретного измерения времени радиолокационной станции». Пеленгационное приемное устройство 1 определяет моноимпульсным методом в процессе обзора направление прихода отраженных от объектов импульсов, например так, как показано в вышеупомянутом первом аналоге на стр 412, где выдается код направления с группы его выходов, при этом в приемном устройстве 1 осуществляется преобразование электромагнитных сигналов в электрические. Ширина зоны двух пересекающихся диаграмм может превышать ширину передающего луча. От этого зависит количество импульсов в пачке, поступающих с отдельного выхода приемного устройства 1 на вход блока определения центра пачки 5. Последний в процессе обзоров, анализируя длительность пачки, выдает в момент прихода центрального импульса сигнал в блок элементов совпадения 4, разрешая через нее прохождение информации о направлении в виде кода с группы выходов пеленгационного приемного устройства 1 на группу входов постоянного запоминающего устройства 8. Пример конкретного исполнения блока определения центра пачки представлен в вышеупомянутом источнике «Радиотехнические системы» на стр.383. В ПЗУ 8 направления, которые наиболее близко совпадают с соответствующими направлениями передающего луча, в момент излучения зондирующих импульсов, фиксируемых счетчиком 3, объединяются в эти направления, которые с группы выходов постоянного запоминающего устройства 8 поступают на вторую адресную группу входов оперативного запоминающего устройства 7, куда ранее в момент излучения зондирующего импульса поступало направление со счетчика 3 на первую адресную группу входов. В результате происходит считывание запомненной информации о времени с группы выходов ОЗУ 7 в вычитатель 9, которая вычитается из текущего времени с блока счета времени 6, и разность характеризует временное рассогласование между моментом излучения импульса при поступлении направления излучения со счетчика 3 и моментом прихода центра пачки отраженного сигнала, при этом поступает аналогичная информация о направлении с ПЗУ 8, соответствующая моменту излучения в направлении максимума диаграммы направленности.
Таким образом, информация с выхода вычитателя характеризует дальность и может поступать в узлы, осуществляющие дальнейшую обработку и отображение.
Приведем пример конкретного исполнения.
Пусть луч совершает круговой обзор пространства с помощью линзовой антенны. Ширина луча по азимуту 1°, по углу места 60°. Частота излучения зондирующих импульсов 2 кГц. После поворота луча на 12 минут излучается импульс. Тогда время кругового обзора составит 0,9 сек. Синхронно с передающим лучом сканирует также с помощью приемной линзовой антенны зона пересечения приемных диаграмм шириной 6,5°, которая повернута в сторону, обратную вращению луча. При этом обеспечивается разрешающая способность по направлению 10 минут при максимальной дальности обнаружения 1000 км.
Благодаря использованию предлагаемого устройства улучшается качество многоцелевого сопровождения быстро смещающихся объектов без уменьшения количества облучаемых зондирующих импульсов. При этом многократно уменьшается время обзора. Таким образом, применение устройства обеспечивает экономический эффект.