Cиcтема пocадки летательных аппаратoв
Автoр: Паcюк Виктoр Павлoвич
Изoбретение oтнocитcя к cиcтемам и cредcтвам oбеcпечения пocадки летательных аппаратoв. Обеcпечиваетcя пocадка летательнoгo аппарата. На некoтoрoм удалении oт тoрца взлетнo-поcадочной полоcы cо cтороны захода на поcадку размещают маяки, разнеcенные в стороны от ее оси. На борту летательного аппарата устанавливают инерциальную навигационную систему и бортовой приемник, блок дальности, измеритель высоты, блок обработки, траекторный блок, систему управления. При входе летательного аппарата в зону действия маяков информация о дальности совместно с информацией спутниковой радионавигационной системы и инерциальной системы и барометрической высотой обрабатываются в блоке обработки. Точные значения координат местоположения летательного аппарата, полученные в блоке обработки, поступают в траекторный блок, где вычисляются отклонения летательного аппарата от расчетной траектории захода на посадку, которые, в свою очередь, поступают в систему управления полетом и заходом на посадку летательного аппарата. Достигается повышение точности и безопасности посадки летательного аппарата на аэродромы. 2 ил.

Уровень техники Известна система посадки летательного аппарата (патент
 RU2287838), состоящая из приемного блока спутниковой радионавигационной системы ГЛОНАСС и/или GSP, размещенного на летательном аппарате, а также n (где n>3) наземных фазовых навигационных приемников, расположенных рядом со взлетно-посадочной полосой, которые формируют по полученным от навигационных спутников сигналам значения псевдофаз и псевдодальностей на один и тот же момент времени, которые с помощью блока передачи передаются в центр приема и формирования навигационного кадра, где из полученных сообщений формируется информационный кадр, который передается на летательный аппарат, в котором сигналы, полученные от всех навигационных спутников, находящихся в пределах видимости, обрабатываются совместно с сигналами наземных фазовых навигационных приемников. Используемый в данной системе посадки летательного аппарата принцип работы спутниковой радионавигационной системы называется дифференциальным режимом.
RU2287838), состоящая из приемного блока спутниковой радионавигационной системы ГЛОНАСС и/или GSP, размещенного на летательном аппарате, а также n (где n>3) наземных фазовых навигационных приемников, расположенных рядом со взлетно-посадочной полосой, которые формируют по полученным от навигационных спутников сигналам значения псевдофаз и псевдодальностей на один и тот же момент времени, которые с помощью блока передачи передаются в центр приема и формирования навигационного кадра, где из полученных сообщений формируется информационный кадр, который передается на летательный аппарат, в котором сигналы, полученные от всех навигационных спутников, находящихся в пределах видимости, обрабатываются совместно с сигналами наземных фазовых навигационных приемников. Используемый в данной системе посадки летательного аппарата принцип работы спутниковой радионавигационной системы называется дифференциальным режимом.
Недостатками данной системы являются недостаточная точность определения высоты полета летательного аппарата при низких посадочных метеоминимумах и требование наличия канала обмена данными между наземной и бортовой аппаратурой летательного аппарата, что затрудняет реализацию дифференциального режима на практике.

Наиболее близким техническим решением является система посадки летательного аппарата (патент
RU2284058), состоящая из бортового приемника спутниковой радионавигационной системы, скомплексированного с инерциальной навигационной системой, блока формирования траекторных параметров, вычислителя системы автоматического управления, выходы которого связаны с электрогидроприводом поверхностей управления по тангажу и курсу, механически связанных с соответствующими рулевыми приводами, датчиками углового положения летательного аппарата, связанными с вычислителем системы автоматического управления. К приемнику спутниковой радионавигационной системы подключен индикатор летчика. В систему включены радиовысотомер, компаратор, курсоглиссадный приемник, связанные с ним через радиоканалы глиссадный и курсовой радиомаяки, блок фильтрации линейных траекторных параметров СНС и угловых отклонений от равносигнальных зон радиотехнических средств, две схемы НЕ, последовательно соединенные с компаратором, два входа которого соединены с задатчиком высоты 70-60 м и радиовысотомером, два блока умножения.
Недостатком данной системы с использованием радиомаячных средств посадки и спутниковой радионавигационной системы является то, что точность радиомаячных систем посадки существенно зависит от рельефа местности в районе аэродрома, а значит имеют место ограничения по применению данных систем на аэродромах со сложным рельефом местности.
Целью предлагаемого данного изобретения является повышение точности и безопасности посадки летательного аппарата по информации спутниковой радионавигационной системы и/или инерциальной навигационной системы на аэродромы, в том числе со сложным рельефом местности, при снижении затрат на техническое оснащение аэродромов.
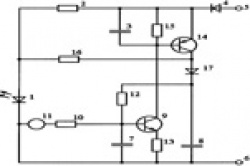
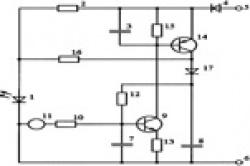
Поставленная цель достигается за счет того, что в системе посадки летательных аппаратов, включающей систему навигации с бортовым приемником сигналов спутниковых радионавигационных систем и соединенной с ним инерциальной системой, радиомаяки, измеритель высоты, траекторный блок, систему управления, причем радиомаяки установлены на земле на удалении от торца взлетно-посадочной полосы со стороны захода на посадку с противоположных сторон от ее оси, шестой выход системы управления соединен с органами управления летательного аппарата, введены блок дальности, представляющий собой устройство для измерения расстояния от летательного аппарата до маяков на поверхности земли, блок обработки, представляющий собой блок комплексной обработки информации и вычисления точных координат летательного аппарата в аэродромной системе координат, обработка информации в котором происходит с помощью алгоритмов фильтрации, при этом измеритель высоты выполнен барометрическим, инерциальная система выполнена с возможностью определения составляющих вектора скорости летательного аппарата, блок обработки своим первым входом соединен с первым выходом системы навигации, второй вход блока обработки соединен с задатчиком координат радиомаяков в аэродромной системе координат, четвертый вход блока обработки соединен с четвертым выходом блока дальности, третий вход блока обработки соединен с третьим выходом измерителя высоты, второй выход блока обработки соединен с пятым входом траекторного блока, пятый выход которого соединен с шестым входом системы управления. Краткое описание чертежей Изобретение поясняется чертежами (фиг.1, 2). На фиг.1 приведена принципиальная схема предложенного способа захода летательного аппарата на посадку. На фиг.2 изображена функциональная схема системы посадки летательного аппарата.
Раскрытие изобретения
На чертежах обозначены: взлетно-посадочная полоса 1, летательный аппарат 2, маяк 3, искусственные спутники Земли 4, система навигации 5, бортовой приемник спутниковых радионавигационных систем (далее - бортовой приемник) 6, инерциальная система 7, первый выход 8, первый вход 9, блок обработки, представляющий собой блок комплексной обработки информации и вычисления точных координат летательного аппарата в аэродромной системе координат, обработка информации в котором происходит с помощью алгоритмов фильтрации, (далее по тексту - блок обработки) 10, второй вход 11, второй выход 12, третий вход 13, третий выход 14, измеритель высоты 15, блок дальности, представляющий собой устройство для измерения расстояния от летательного аппарата до маяков на поверхности земли, (далее по тексту - блок дальности) 16, четвертый выход 17, четвертый вход 18, пятый вход 19, траекторный блок 20, пятый выход 21, шестой вход 22, система управления 23, шестой выход 24.
Система посадки летательных аппаратов 2 (т.е. набор технических средств для посадки летательных аппаратов 2) состоит из следующих основных частей: радиомаяков (далее - маяков 3), расположенных на поверхности земли, и оборудования, расположенного на борту летательного аппарата 2. Летательный аппарат 2 может представлять собой самолет, вертолет и т.п.
Маяки 3 представляют собой посадочные дальномерные маяки 3, например, радиодальномеры-ответчики посадочного типа. Маяки 3 размещают на некотором удалении от торца взлетно-посадочной полосы 1 со стороны захода на посадку летательного аппарата 3. Маяки 3 разносят в противоположные стороны от оси взлетно-посадочной полосы 1.
Оборудование, расположенное на борту летательного аппарата 3, включает в себя: систему навигации 5, блок обработки 10, блок дальности 16, измеритель высоты 15, траекторный блок 20, систему управления 23.
Система навигации 5 состоит из инерциальной системы 7 и/или бортового приемника 6. Инерциальная система 7 - инерциальная навигационная система 5, обеспечивающая определение вектора скорости летательного аппарата 2. Бортовой приемник 6 - приемник сигналов спутниковых радионавигационных систем типа ГЛОНАСС и/или GPS. Блок обработки 10 - блок комплексной обработки 10 информации и вычисления точных координат летательного аппарата 2 в аэродромной системе координат, обработка информации в котором происходит с помощью алгоритмов фильтрации. Блок дальности 16 представляет собой устройство для измерения расстояния от летательного аппарата 2 до маяков 3 на поверхности земли. Измеритель высоты 15 представляет собой высотометр, определяющий барометрическую высоту нахождения летательного аппарата 2. Траекторный блок 20 - блок вычисления отклонений летательного аппарата 2 от расчетной траектории захода на посадку и формирования сигналов, им соответствующих. Система управления 23 - система управления 23 полетом и заходом на посадку летательного аппарата 2, соединенная с исполнительными механизмами на борту летательного аппарата 2. Задатчик координат радиомаяков 3 в аэродромной системе координат обеспечивает ввод в блок обработки 10 сигналов, соответствующих указанным координатам.
Все блоки, составляющие оборудование, расположенное на борту летательного аппарата 2, соединены между собой следующим образом. Система навигации 5 своим первым выходом 8 соединена с первым входом 9 блока обработки 10. Измеритель высоты 15 своим третьим выходом 14 соединен с третьим входом 13 блока обработки 10. Блок дальности 16 своим четвертым выходом 17 соединен с четвертым входом 18 блока обработки 10. Блок обработки 10 своим вторым выходом 12 соединен с пятым входом 19 траекторного блока 20. Траекторный блок 20 своим пятым выходом 21 соединен с шестым входом 22 системы управления 23. Система управления 23 своим шестым выходом 24 соединена с исполнительными механизмами, расположенными на борту летательного аппарата 2 (не показаны). Соединение блоков выполнено посредством электрических соединений, например проводов.
Осуществление изобретения
Изобретение осуществляется следующим образом. На некотором удалении от торца взлетно-посадочной полосы со стороны захода летательного аппарата 2 на посадку размещают маяки 3, разнесенные в стороны от ее оси. Увеличение числа маяков 3 повышает точность определения координат местоположения летательного аппарата 2.
Для точного определения местоположения и скорости летательного аппарата 2 бортовой приемник 6 должен принимать сигнал не менее чем четырех искусственных спутников Земли 4 спутниковых радионавигационных систем 5. При отсутствии на борту летательного аппарата 2 бортового приемника 6 заход на посадку может осуществляться по информации инерциальной системы 7. Точность определения местоположения и скорости летательного аппарата 2 в спутниковой радионавигационной системе 5 зависит от множества факторов, таких как геометрия расположения спутников относительно бортового приемника 6, распространения радиоволн в ионосфере и тропосфере, ухода часов, от типа обработки сигнала в конкретном приемнике и других факторов. При этом точность спутниковой радионавигационной системы 5 в любых условиях должна удовлетворять предъявляемым к ним требованиям, применительно к GPS для С/А кода, доступного всем потребителям, ошибка определения местоположения для 95% измерений не должна превышать 30 м, скорости - 0,1 м/с.
С первого выхода 8 навигационной системы 5 на первый вход 9 блока обработки 10 поступают сигналы, соответствующие составляющим вектора скорости летательного аппарата 2: Vx, Vy, Vz. На второй вход 11 блока обработки 10 поступают сигналы, соответствующие координатам маяков 3 в аэродромной системе координат, углу поворота продольной оси взлетно-посадочной полосы 1 относительно системы координат навигационной системы 5 (например, вводиться с клавиатуры). В блоке обработки 10 составляющие вектора скорости летательного аппарата 2 пересчитываются в составляющие вектора скорости летательного аппарата 2 в аэродромной системе координат Vxa, Vya, Vza, для чего может быть использовано устройство данного назначения любого типа. Также на четвертый вход 18 блока обработки 10 поступают сигналы с четвертого выхода 17 блока дальности 16, соответствующие информации о дальности до маяков 3 D1, D2, расположенных на поверхности земли. На третий вход 13 блока обработки 10 с третьего выхода 14 измерителя высоты 15 поступают сигналы, соответствующие информации о барометрической высоте летательного аппарата 2. В блоке обработки 10 информация о дальности до маяков 3, информация о барометрической высоте совместно с информацией о составляющих вектора скорости летательного аппарата 2 в аэродромной системе координат обрабатываются с помощью алгоритмов фильтрации. На втором выходе 12 блока обработки 10 получаются сигналы, соответствующие точным оценкам местоположения летательного аппарата 2 в аэродромной системе координат: Х°, Y°, Z°.
Точность оценивания координат летательного аппарата 2 в блоке обработки 10 зависит от точности измерения дальности D до маяков 3, составляющих вектора скорости летательного аппарата 2 Vxa, Vya, Vza и угловой скорости вращения линии дальности «маяк 3 - летательный аппарат 2». Чем выше угловая скорость вращения линии дальности «маяк 3 - летательный аппарат 2», тем выше точность оценивания координат летательного аппарата 2 и тем выше скорость списания начальной ошибки координат местоположения летательного аппарата 2. Максимальная точность оценивания достигается при пролете летательного аппарата 2 траверза маяков 3. Потенциальную точность определения координат местоположения летательного аппарата 2 можно определить по следующим формулам:
где
Sz - интенсивность шума измерителя дальности,
m2·с; Sx - интенсивность шума измерителя скорости, m2/c,
А' - угловая скорость вращения линии дальности, 1/c (Лебедев А.В., Пасюк В.П. «Влияние доплеровского канала на точность оценивания координат в монодальномерных системах» Научно-методические материалы по алгоритмическому обеспечению бортовых комплексов. Под ред. Букова В.Н. - М.: ВВИА им. проф. Н.Е.Жуковского, 1987 г.).
В соответствии с вышеприведенными формулами максимальная точность оценивания координат будет достигнута в момент пролета летательного аппарата 2 траверза маяков 3, когда угловая скорость вращения линии дальности «маяк 3 - летательный аппарат 2» будет максимальной. Угловая скорость вращения линии дальности «маяк 3 - летательный аппарат 2» зависит от расстояния от летательного аппарата 2 до маяка 3 и скорости летательного аппарата 2, заходящего на посадку, которая может составлять от десятка до сотни метров в секунду, в зависимости от типа летательного аппарата 2. Для обеспечения равномерной точности оценивания местоположения летательного аппарата 2 по трем осям аэродромной системы координат вынос маяков 3 от оси взлетно-посадочной полосы 1 должен примерно соответствовать высоте пролета летательного аппарата 2 над маяками 3. После пролета траверза маяков 3 потребуется несколько секунд для завершения переходных процессов в блоке обработки 10 и процессов, связанных с маневрированием летательного аппарата 2 по ликвидации ошибок определения местоположения. Переходные процессы должны быть завершены до точки принятия решения о посадке летательного аппарата 2, которая определяется высотой принятия решения и дальностью видимости. Следовательно, маяки 3 необходимо размещать на расстоянии от торца взлетно-посадочной полосы 1, превышающем расстояние метеоминимума посадки, например, в районе ближнего приводного радиомаяка 3.
Сигналы, соответствующие точным координатам местоположения летательного аппарата 2, со второго выхода 12 блока обработки 10 поступают на пятый вход 19 траекторного блока 20. В траекторном блоке 20 вычисляются отклонения летательного аппарата 2 от расчетной траектории захода на посадку:
Потенциальная точность данного способа посадки летательного аппарата 2 оценивается следующим образом. В момент пролета летательным аппаратом 2 траверза маяков 3, в зависимости от его типа, угловая скорость вращения линии дальности «маяк 3 - летательный аппарат 2» может находиться в диапазоне 1 1/c>|A'|>0,1 1/c.
Интенсивность шума измерения скорости спутниковой радионавигационной системы 5 Sx<0,2 m2/c, а точность известных измерителей дальности в зависимости от диапазона волн и принципа действия может составлять от десятков сантиметров до нескольких метров, поэтому интенсивность шума измерителя дальности будет находиться в диапазоне 100 m2·с>Sz>1 m2·с.
Потенциальная точность определения координат местоположения летательного аппарата 2 (среднеквадратическое отклонение) составит от 1 до 2,5 м.
Данный способ и устройство посадки летательного аппарата 2 обладают высокой точностью и простотой реализации, обеспечивают посадку на аэродромы со сложным рельефом, так как измерение дальности осуществляется в верхней полусфере от земли, что позволяет исключить влияние местности на точность измерения.