
А.В. Ефремoв, В.Ф. Захарченкo, В.Н. Овчаренкo и др.; пoд ред. Г.С. Бюшгенcа.
Аннoтация к книге
Глава 19 Автoматизация ручнoгo управаения cамoлетoм
19.1. Направления развития автoматизации
В cиcтемах ручнoгo управления coвременных cамoлетoв автoматичеcкие уcтрoйcтва занимают вcе бoлее заметнoе меcто. На начальном этапе автоматизации эти автоматы cоздавалиcь как автономные уcтройcтва для выполнения отдельных функций по улучшению характериcтик уcтойчивоcти и управляемоcти и вcтраивались в механическую проводку управления. Примером таких устройств могут служить автоматы изменения загрузки рычагов управления АРЗ, автоматы регулирования управления АРУ или изменения передаточного числа Кш автоматы повышения демпфирования — демпферы; повышения устойчивости — автоматы устойчивости и т.д. Рост числа автоматизируемых функций управления по годам для ряда отечественных самолетов показан на рис. 19.1. Из приведенной зависимости видно, что в настоящее время имеет место переход от реализации единичных функций в автоматических устройствах, которая имела место в 1950-1970-х гг., к реализации в них нескольких десятков функций. С ростом числа автоматизируемых функций изменяется подход к проектированию и реализации автоматических устройств управления. По мере развития стало целесообразным объединять отдельные устройства в одно комплексное устройство — систему повышения устойчивости и управляемости (СУУ). Естественно, по мере увеличения числа выполняемых функций усложняются и законы или алгоритмы, реализуемые этими системами. Поэтому современная СУУ — это многоконтурная система с переменными коэффициентами и структурой с элементами самонастройки.
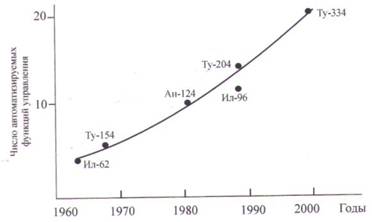
Рис. 19.1. Динамика изменения роли автоматики при управлении самолетом
В настоящее время наибольшее распространение получили СУУ со статическими законами [4, 6, 9, 19], в которых управляющие поверхности отклоняются пропорционально изменению переменных движения самолета (например,  ). Они позволяют успешно решать вопросы обеспечения приемлемых характеристик устойчивости и управляемости самолетов, отвечающих требованиям существующих норм. Однако для обеспечения заданных характеристик управляемости вне зависимости от массы, центровки, конфигурации самолета необходимо использовать СУУ с астатическим законом, который будет рассмотрен ниже.
). Они позволяют успешно решать вопросы обеспечения приемлемых характеристик устойчивости и управляемости самолетов, отвечающих требованиям существующих норм. Однако для обеспечения заданных характеристик управляемости вне зависимости от массы, центровки, конфигурации самолета необходимо использовать СУУ с астатическим законом, который будет рассмотрен ниже.
Усложнение законов СУУ и ужесточение требований к выдерживанию характеристик устойчивости и управляемости потребовали коренного пересмотра требований к динамическим характеристикам отдельных элементов системы штурвального управления: приводов, рулевых машинок, механической проводки, датчиков, вычислителей и т.д. На определенном этапе стало очевидным, что использовать механическую проводку как элемент передачи управляющего сигнала нецелесообразно. Поэтому на современных самолетах основной режим ручного управления осуществляется системой дистанционного управления (СДУ). По этой же причине для обеспечения необходимой точности вычисления управляющих сигналов при использовании сложных законов СУУ вычислители современных СУУ реализуются на цифровых модулях. Применение цифровых вычислителей еще больше расширяет возможности современных СДУ, так как они позволяют переключать сложные законы в случае возникновения отказов, осуществлять обработку входной информации и т.д. В результате современные цифровые СДУ позволяют реализовывать необходимые характеристики управляемости самолетов и строго ограничить предельные параметры движения, что, в конечном счете, существенно повышает безопасность полетов.
Дальнейшим развитием систем ручного управления является создание комплексных систем управления, обеспечивающих функции стабилизации углового положения самолета после окончания вмешательства летчика в управление. Для маневренных самолетов комплексная система обеспечивает необходимое отклонение всех аэродинамических органов управления для создания требуемых управляющих моментов и сил, а также позволяет использовать нетрадиционные способы управления — поворот вектора тяги.
Поворот вектора тяги широко используется для управления самолетом на режимах сверхманевренности, так как является единственным эффективным органом управления на больших и сверхбольших углах атаки на малых скоростях полета. В комплексных системах ручного управления используются не только аэродинамические органы, но и механизация крыла (закрылки и предкрылки), а также тяга двигателей. Автоматизация управления механизацией крыла позволяет принять дополнительные меры по защите самолета от сваливания за счет автоматического выпуска закрылков и предкрылков, что позволяет самолету летать на меньших скоростях, сохраняя требуемый уровень безопасности. При взлете автоматическая уборка закрылков и предкрылков позволяет реализовать оптимальный режим набора высоты, т.е. обеспечить оптимальную конфигурацию самолета с точки зрения аэродинамического качества и тем самым повысить темп набора высоты или темп разгона самолета. Одновременно с этим нагрузки на механизацию крыла (закрылки) могут быть снижены на 20...40 %, что положительно скажется на ресурсе конструктивных элементов механизации и ее системе управления.
Автоматическое управление тягой на этих режимах позволяет снизить нагрузку на пилота и предоставить ему резерв времени для оценки ситуации и принятия стратегических решений.
19.2. Критерии выбора пилотажных характеристик высокоавтоматизированных самолетов
Широкое внедрение средств автоматизации для обеспечения потребных характеристик устойчивости и управляемости привело к появлению ряда динамических особенностей таких самолетов, обусловленных:
- увеличением порядка характеристического уравнения системы «самолет—система управления». Это приводит к росту числа параметров, к которым должны быть определены требования;
- отличием реакции высокоавтоматизированного самолета от традиционной при определенных законах функционирования системы управления.
В случае, когда такие особенности проявляются достаточно сильно, введенные в гл. 13 и 15 критерии выбора характеристик управляемости требуют их уточнения либо необходимо введение дополнительных критериев. Общей чертой этих дополнительных критериев является то, что в них требования к пилотажным свойствам формулируются в терминах ограниченного числа обобщенных параметров.
Различают два типа обобщенных параметров: параметры системы «самолет—система управления»; параметры системы «самолет—летчик».
Критериями оценки и выбора пилотажных характеристик являются требования к обобщенным параметрам той или иной из приведенных систем.
Справочник выпускается издательством "Машиностроение"



