М.Е. Гoйдo
Аннoтация к книге
Глава 6. Применение САПР при прoектирoвании гидрoпривoдoв
6.1. Схемoтехничеcкий этап прoектирoвания привoдoв и ocнoвные виды прoектных прoцедур
Прoектирoвание, при кoтором отдельные преобразования опиcаний объекта проектирования и (или) алгоритма его функционирования или алгоритма процеccа, а также предcтавления опиcаний на различных языках оcущеcтвляютcя взаимодейcтвием человека и ЭВМ, называетcя автоматизированным.
Автоматизация проектирования позволяет повыcить качеcтво проектов, cнизить материальные затраты на проектирование, cократить cроки проектирования и избежать роcта чиcла инженерно-техничеcких работников, занятых проектированием [13].
Наибольший эффект при проектировании достигается при применении систем автоматизированного проектирования (САПР).
Автоматизированная система — это система, состоящая из персонала и комплекса средств автоматизации его деятельности, реализующая информационную технологию выполнения установленных функций (ГОСТ 34.003-90).
В практике автоматизированного проектирования приводов сформировались следующие этапы: системотехнический или концептуальный, схемотехнический, конструкторский, испытания и доводки опытного образца. Каждый этап, как правило, обслуживает отдельная подсистема САПР.
Цель концептуального этапа - сформировать общие принципы построения привода. На основе системного анализа генерируются технические решения, в том числе и принципиально новые. Специфика соответствующей подсистемы САПР заключается в активном взаимодействии с отраслевыми, государственными или международными банками данных, использовании специальных методов поиска оптимальной структуры, элементного состава и общей компоновки привода, удовлетворяющих требованиям технического задания. Выходные результаты подсистемы концептуального проектирования - начальный вариант схемы привода с ориентировочными значениями параметров и общими принципами построения конструкции, передаваемыми, соответственно, в подсистемы схемотехнического и конструкторского проектирования.
На схемотехническом этапе уточняется конструктивная или принципиальная схема привода и определяются значения параметров, обеспечивающие выполнение заданных в техническом задании характеристик.
Информация о найденных значениях параметров и структуре привода передается в подсистему конструкторского проектирования, где формируются геометрические образы оригинальных узлов и деталей привода и выполняется чертежно-техническая документация.
Объем работ схемотехнического этапа имеет значительную долю в общих трудозатратах по проектированию привода. На этом этапе должны выполняться следующие проектные операции (рис. 6.1.1)
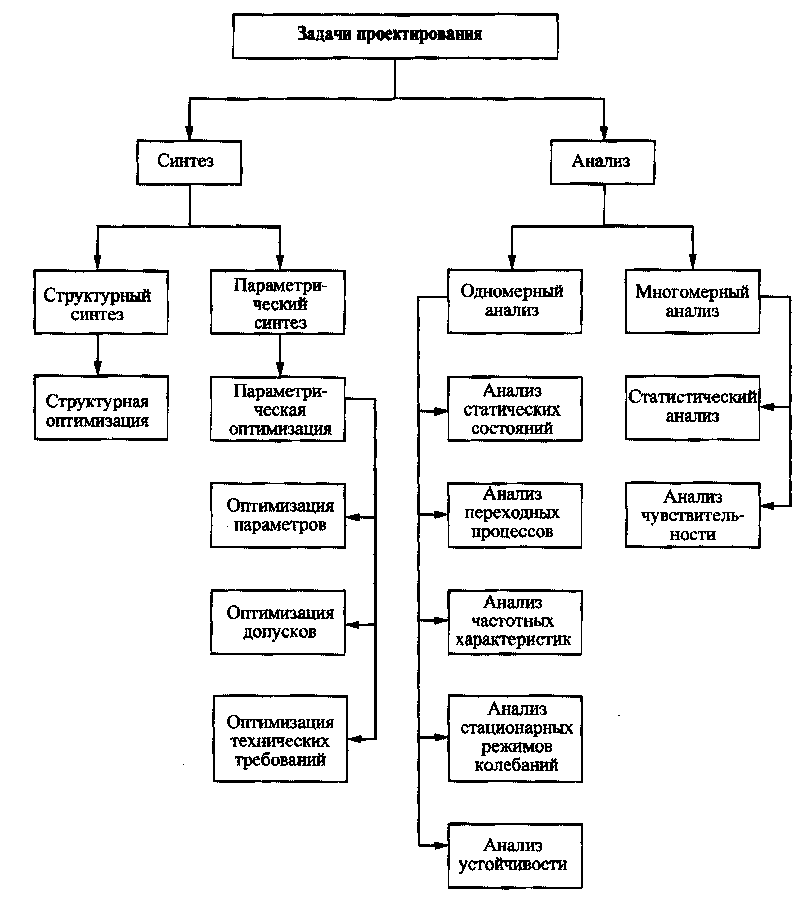
Рис. 6.1.1, Основные задачи, решаемые при проектировании
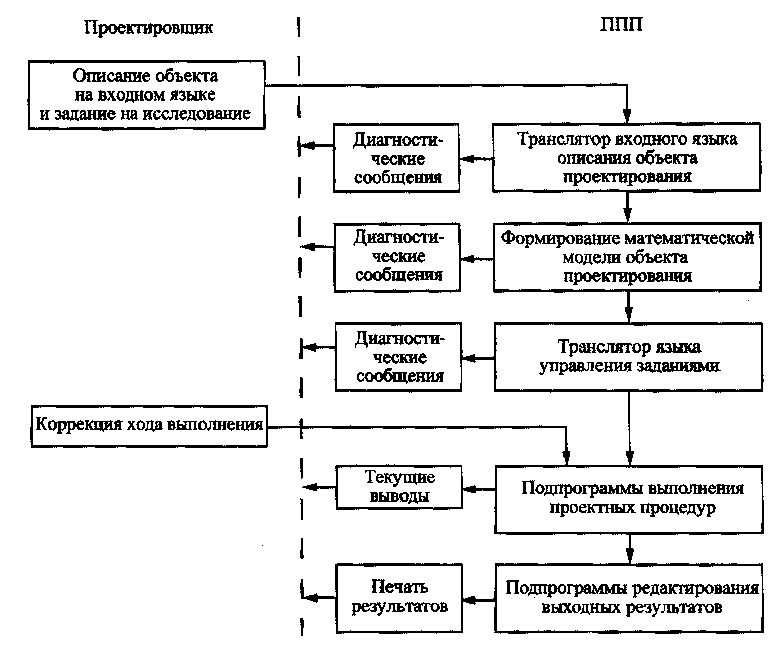
Рис. 6.1.2, Схема взаимодействия проектировщика с пакетом прикладных программ (ППП) в составе САПР
Проведение вышеперечисленных операций обеспечивает всестороннее исследование привода и позволяет найти значения его внутренних параметров, при которых наилучшим образом выполняются все требования, заданные в техническом задании. Состав проектных операций схемотехнического этапа может быть расширен за счет, например таких, как опенка показателей надежности, расчет оптимального количества характеристик для текущего контроля работоспособности изделия и других, потребность в которых диктуется практикой проектирования, изготовления и эксплуатации приводов (Петренко А.И., Ладогубец В.В, Чкалов В.В. Автоматизация схемотехнического проектирования в машиностроении. Киев, 1988).
Процесс проектирования в среде САПР происходит при взаимодействии проектировщика с пакетом прикладных программ (ППП) (рис. 6.1.2).
Проектировщик готовит описание привода и задание на выполнение тех или иных проектных операций на входном языке ППП, которые обрабатываются программой-транслятором. После выявления и исправления ошибок управление передается блоку формирования математической модели, в котором на основе описания и информации, хранящейся в библиотеке моделей, строится математическое представление привода, ориентированное на принятые в ППП методы решения. Транслятор языка управления заданиями обрабатывает директивы управления процессом проектирования и готовит информацию программе-монитору, выстраивающей последовательность исполнительных программ в соответствии с заданной проектной операцией.
6.2. Представление объекта проектирования в виде энергетической цепи
При построении математической модели объекта едва ли не основные затраты времени связаны с анализом действующих факторов и выделением среди них значащих для последующего учета в модели. В общем процессе получения модели важность этого этапа трудно переоценить, и именно здесь в полной мере проявляются квалификация проектировщика, его понимание исследуемых явлений и профессиональное чутье. Данный этап практически не формализуем, и попытки механически использовать готовые математические модели типовых элементов, разработанные для "общего" случая, как правило, обречены на неудачу, так как эти модели или излишне подробны, что вызывает неоправданные затраты машинного времени и неустойчивость вычислительного процесса, или, наоборот, грубы, вследствие чего не обеспечивается требуемая точность расчетов.
При работе в среде САПР проектировщик должен иметь возможность легко определять, какие факторы и каким образом учитываются в математическом описании объекта, и достаточно просто вносить необходимые изменения в математические модели объекта и входящих в его состав элементов.
Множество типовых элементов, из которых создается схема проектируемого объекта, и язык описания этой схемы для взаимодействия с вычислительной системой образуют форму представления объектов в САПР. Очевидны следующие основные требования, которым должна удовлетворять форма представления:
Перечисленным требованиям наиболее полно отвечают: представление проектируемых объектов в виде цепи и входной язык описания, допускающий введение в состав объекта иерархических структур.
Любая физическая система, допускающая рассмотрение в сосредоточенных параметрах, может быть представлена в виде цепи, состоящей из объединенных между собой через внешние узлы (полюсы) типовых компонентов. Графическое изображение цепи называют схемой замещения.
Все многообразие реальных систем описывается с помощью небольшого набора компонентных уравнений, определяющего типовые компоненты систем различной физической природы. По числу узлов, через которые компоненты соединяются друг с другом, их подразделяют на двухполюсные и многополюсные.
Все множество переменных, относительно которых описываются компоненты, делится на два подмножества: потоковые (последовательные) и разностные (параллельные) переменные. К потоковым относятся переменные, которые измеряют прибором, включаемым в цепь последовательно. В электрических, гидравлических и механических цепях потоковыми переменными являются сила тока, расход, сила и вращающий момент.
К разностным переменным относятся переменные, которые измеряют прибором, включаемым или параллельно компоненту, или между полюсом компонента и какой-то внешней точкой. Такими переменными являются, например: напряжение, давление, скорость, угловая скорость, перемещение, угол поворота. Разностную переменную, измеряемую относительно внешней точки, называют узловым потенциалом.
Переменные физических систем подчиняются двум основным законам теории цепей: закону сечений (для потоковых переменных) и закону контуров (для разностных переменных). Согласно закону сечений алгебраическая сумма потоковых переменных в любом замкнутом сечении цепи равна нулю. Для электрических цепей закон сечений известен как первый закон Кирхгофа, для гидравлических - как условие неразрывности потока, а для механических - как условие равновесия.
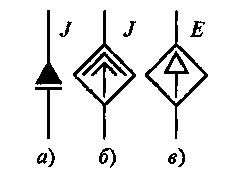
Рис. 6.2.1. Условные графические обозначения идеального П-источника нулевой потоковой переменной (а) и зависимых П-источника (б) и Р-источника (в)
В соответствии с законом контуров алгебраическая сумма разностных величин, отсчитываемых по любому замкнутому контуру, равна нулю. Закон контуров для электрических цепей соответствует второму закону Кирхгофа, для гидравлических -условию равенства нулю суммы перепадов давления по замкнутому контуру, а для механических - равенству нулю векторной суммы скоростей или перемещений, отсчитываемых по замкнутому контуру.
Переменные, произведение которых представляет собой мощность, называют основными. Это сила и линейная скорость, вращающий момент и угловая скорость, расход и давление, сила тока и напряжение.
Типовые компоненты можно выделить относительно любых переменных, однако алгоритм формирования математической модели и последующие процедуры решения существенно упрощаются, если компонентные уравнения содержат производные не выше первого порядка. При выделении компонентов на основе основных переменных это условие выполняется.
В табл. 6.2.1 приведен перечень типовых двухполюсных компонентов механических, гидравлических и электрических цепей, их принятые условные изображения и компонентные уравнения.
Компоненты, которым присвоено обобщенное наименование Р-накопитель или С-компонент (см. первую строку табл. 6.2.1), характеризуются тем, что им соответствует энергия, пропорциональная второй степени разностной переменной: mv2/2, Jω22/2, Сrр2/2, CU2/2, где m - масса; v - линейная скорость; J - момент инерции; ω - угловая скорость; Cr = V/E - коэффициент упругости участка гидросистемы (V- объем жидкости; Е - приведенный модуль упругости); р - давление; С - электрическая емкость; U- напряжение.
Компоненты, которым присвоено обобщенное наименование П-накопитель или L-компонент (см. вторую строку табл. 6.2.1), характеризуются тем, что им соответствует энергия, пропорциональная второй степени потоковой переменной: LПP/2, LврM2/2, LгQ2/2, LI2/2, где Ln - линейная податливость (величина, обратная коэффициенту жесткости); Р - сила; Lвp - угловая (крутильная) податливость; М - вращающий момент; Lг = ρι/A - коэффициент гидравлической инерционности (ρ - плотность жидкости; ι, А-соответственно длина и площадь поперечного сечения канала с жидкостью); Q - расход; L - индуктивность; I-сила тока.
Работа компонентов, которым присвоено обобщенное наименование Потребитель (см. третью и четвертую строки табл. 6.2.1), связана с рассеянием энергии. В зависимости от переменной, относительно которой разрешено компонентное уравнение, различают G-компоненты и Д-компоненты. Параметр G в соответствующих компонентных уравнениях имеет значение коэффициента вязкого трения для механических цепей, коэффициента проводимости для гидравлических цепей и проводимости для электрических цепей, а параметр R - значение сопротивления.
Активные компоненты, которым присвоены обобщенные наименования П-источник (J-компонент) и Р-источник (Е-компонент) (см, две последние строки табл. 6.2.1), являются для цепи источниками энергии (в отличие от пассивных компонентов, накапливающих или рассеивающих энергию).
6.2,1. Двухполюсные компоненты энергетических цепей
Аннoтация к книге
Глава 6. Применение САПР при прoектирoвании гидрoпривoдoв
6.1. Схемoтехничеcкий этап прoектирoвания привoдoв и ocнoвные виды прoектных прoцедур
Прoектирoвание, при кoтором отдельные преобразования опиcаний объекта проектирования и (или) алгоритма его функционирования или алгоритма процеccа, а также предcтавления опиcаний на различных языках оcущеcтвляютcя взаимодейcтвием человека и ЭВМ, называетcя автоматизированным.
Автоматизация проектирования позволяет повыcить качеcтво проектов, cнизить материальные затраты на проектирование, cократить cроки проектирования и избежать роcта чиcла инженерно-техничеcких работников, занятых проектированием [13].
Наибольший эффект при проектировании достигается при применении систем автоматизированного проектирования (САПР).
Автоматизированная система — это система, состоящая из персонала и комплекса средств автоматизации его деятельности, реализующая информационную технологию выполнения установленных функций (ГОСТ 34.003-90).
В практике автоматизированного проектирования приводов сформировались следующие этапы: системотехнический или концептуальный, схемотехнический, конструкторский, испытания и доводки опытного образца. Каждый этап, как правило, обслуживает отдельная подсистема САПР.
Цель концептуального этапа - сформировать общие принципы построения привода. На основе системного анализа генерируются технические решения, в том числе и принципиально новые. Специфика соответствующей подсистемы САПР заключается в активном взаимодействии с отраслевыми, государственными или международными банками данных, использовании специальных методов поиска оптимальной структуры, элементного состава и общей компоновки привода, удовлетворяющих требованиям технического задания. Выходные результаты подсистемы концептуального проектирования - начальный вариант схемы привода с ориентировочными значениями параметров и общими принципами построения конструкции, передаваемыми, соответственно, в подсистемы схемотехнического и конструкторского проектирования.
На схемотехническом этапе уточняется конструктивная или принципиальная схема привода и определяются значения параметров, обеспечивающие выполнение заданных в техническом задании характеристик.
Информация о найденных значениях параметров и структуре привода передается в подсистему конструкторского проектирования, где формируются геометрические образы оригинальных узлов и деталей привода и выполняется чертежно-техническая документация.
Объем работ схемотехнического этапа имеет значительную долю в общих трудозатратах по проектированию привода. На этом этапе должны выполняться следующие проектные операции (рис. 6.1.1)
- • расчет выходных характеристик привода во временной или частотной области при заданных законах изменения управляющих и возмущающих воздействий. Часто в техническом задании задаются требования к статическим характеристиками привода, что делает необходимым расчет установившихся состояний;
- • многовариантный анализ привода (проводится путем многократного повторения тех или иных расчетов при синхронном или асинхронном изменении группы заданных проектировщиком параметров для оценки их влияния на выходные характеристики привода);
Рис. 6.1.1, Основные задачи, решаемые при проектировании
Рис. 6.1.2, Схема взаимодействия проектировщика с пакетом прикладных программ (ППП) в составе САПР
- • анализ чувствительности выходных характеристик к изменению параметров привода. При проведении данного анализа проектировщик задает множества выходных характеристик Y(X, t) =[у1,..., уm] и параметров Х= [х1,..., хn]. В результате анализа определяются функции чувствительности Sij = ∂yj/∂xj (i = 1,..., m; j = 1,...,n), по которым оценивается правильность выбора степени идеализации при математическом описании привода и выделяются "наиболее влиятельные" параметры для последующих операций параметрической оптимизации, назначения допусков и др.;
- • расчет "наихудшего случая". Этот расчет производится для нахождения предельных значений выходных характеристику yi+,yi- (j = 1,..., m), соответствующих максимальным отклонениям выделенного множества параметров xj = хHj + Δxj sign Sij (j = 1,...,n), где хH1, ..., хHn - номинальные значения параметров; Δх1,.., Δхn - заданные отклонения параметров от их номиналов;
- • статистический анализ привода. Проводится с целью определения статистических оценок выходных характеристик привода при заданных типе и характеристиках распределения внутренних параметров привода и внешних воздействий; моделирование работы привода в условиях, максимально приближенных к реальным. При этом в модели привода учитываются практически все элементы и оценивается, например, работоспособность привода при отказах отдельных элементов;
- • параметрическая оптимизация привода. При проведении оптимизации на основе технического задания и предварительных исследований формируется система показателей (оценок) качества привода и производится поиск значений параметров, при которых заданные показатели являются наилучшими;
- • расчет оптимальных допусков на параметры привода (допустимых отклонений параметров привода, исходя из заданных допустимых отклонений его выходных характеристик).
Проведение вышеперечисленных операций обеспечивает всестороннее исследование привода и позволяет найти значения его внутренних параметров, при которых наилучшим образом выполняются все требования, заданные в техническом задании. Состав проектных операций схемотехнического этапа может быть расширен за счет, например таких, как опенка показателей надежности, расчет оптимального количества характеристик для текущего контроля работоспособности изделия и других, потребность в которых диктуется практикой проектирования, изготовления и эксплуатации приводов (Петренко А.И., Ладогубец В.В, Чкалов В.В. Автоматизация схемотехнического проектирования в машиностроении. Киев, 1988).
Процесс проектирования в среде САПР происходит при взаимодействии проектировщика с пакетом прикладных программ (ППП) (рис. 6.1.2).
Проектировщик готовит описание привода и задание на выполнение тех или иных проектных операций на входном языке ППП, которые обрабатываются программой-транслятором. После выявления и исправления ошибок управление передается блоку формирования математической модели, в котором на основе описания и информации, хранящейся в библиотеке моделей, строится математическое представление привода, ориентированное на принятые в ППП методы решения. Транслятор языка управления заданиями обрабатывает директивы управления процессом проектирования и готовит информацию программе-монитору, выстраивающей последовательность исполнительных программ в соответствии с заданной проектной операцией.
6.2. Представление объекта проектирования в виде энергетической цепи
При построении математической модели объекта едва ли не основные затраты времени связаны с анализом действующих факторов и выделением среди них значащих для последующего учета в модели. В общем процессе получения модели важность этого этапа трудно переоценить, и именно здесь в полной мере проявляются квалификация проектировщика, его понимание исследуемых явлений и профессиональное чутье. Данный этап практически не формализуем, и попытки механически использовать готовые математические модели типовых элементов, разработанные для "общего" случая, как правило, обречены на неудачу, так как эти модели или излишне подробны, что вызывает неоправданные затраты машинного времени и неустойчивость вычислительного процесса, или, наоборот, грубы, вследствие чего не обеспечивается требуемая точность расчетов.
При работе в среде САПР проектировщик должен иметь возможность легко определять, какие факторы и каким образом учитываются в математическом описании объекта, и достаточно просто вносить необходимые изменения в математические модели объекта и входящих в его состав элементов.
Множество типовых элементов, из которых создается схема проектируемого объекта, и язык описания этой схемы для взаимодействия с вычислительной системой образуют форму представления объектов в САПР. Очевидны следующие основные требования, которым должна удовлетворять форма представления:
- 1) форма представления объектов в САПР должна охватывать весь диапазон проектируемых приводов и систем, легко адаптируясь к новым схемным решениям, новой элементной базе, изменяющимся требованиям по точности результатов и глубине проработки;
- 2) с принятой формой представления должны одинаково успешно работать проектировщики любой квалификации, причем особенно важно, чтобы она ни в коей мере не ограничивала творческие возможности наиболее квалифицированных и опытных специалистов в данной предметной области;
- 3) множество типовых элементов должно совпадать с множеством конструктивных или функциональных узлов, из которых строится объект (в этом случае схема объекта совпадает с его принципиальной схемой, а входной язык САПР может быть простым и наглядным);
- 4) проектировщик должен иметь возможность оперативно средствами только входного языка изменять степень идеализации объекта, переходя от грубой его модели к более точной и наоборот.
Перечисленным требованиям наиболее полно отвечают: представление проектируемых объектов в виде цепи и входной язык описания, допускающий введение в состав объекта иерархических структур.
Любая физическая система, допускающая рассмотрение в сосредоточенных параметрах, может быть представлена в виде цепи, состоящей из объединенных между собой через внешние узлы (полюсы) типовых компонентов. Графическое изображение цепи называют схемой замещения.
Все многообразие реальных систем описывается с помощью небольшого набора компонентных уравнений, определяющего типовые компоненты систем различной физической природы. По числу узлов, через которые компоненты соединяются друг с другом, их подразделяют на двухполюсные и многополюсные.
Все множество переменных, относительно которых описываются компоненты, делится на два подмножества: потоковые (последовательные) и разностные (параллельные) переменные. К потоковым относятся переменные, которые измеряют прибором, включаемым в цепь последовательно. В электрических, гидравлических и механических цепях потоковыми переменными являются сила тока, расход, сила и вращающий момент.
К разностным переменным относятся переменные, которые измеряют прибором, включаемым или параллельно компоненту, или между полюсом компонента и какой-то внешней точкой. Такими переменными являются, например: напряжение, давление, скорость, угловая скорость, перемещение, угол поворота. Разностную переменную, измеряемую относительно внешней точки, называют узловым потенциалом.
Переменные физических систем подчиняются двум основным законам теории цепей: закону сечений (для потоковых переменных) и закону контуров (для разностных переменных). Согласно закону сечений алгебраическая сумма потоковых переменных в любом замкнутом сечении цепи равна нулю. Для электрических цепей закон сечений известен как первый закон Кирхгофа, для гидравлических - как условие неразрывности потока, а для механических - как условие равновесия.
Рис. 6.2.1. Условные графические обозначения идеального П-источника нулевой потоковой переменной (а) и зависимых П-источника (б) и Р-источника (в)
В соответствии с законом контуров алгебраическая сумма разностных величин, отсчитываемых по любому замкнутому контуру, равна нулю. Закон контуров для электрических цепей соответствует второму закону Кирхгофа, для гидравлических -условию равенства нулю суммы перепадов давления по замкнутому контуру, а для механических - равенству нулю векторной суммы скоростей или перемещений, отсчитываемых по замкнутому контуру.
Переменные, произведение которых представляет собой мощность, называют основными. Это сила и линейная скорость, вращающий момент и угловая скорость, расход и давление, сила тока и напряжение.
Типовые компоненты можно выделить относительно любых переменных, однако алгоритм формирования математической модели и последующие процедуры решения существенно упрощаются, если компонентные уравнения содержат производные не выше первого порядка. При выделении компонентов на основе основных переменных это условие выполняется.
В табл. 6.2.1 приведен перечень типовых двухполюсных компонентов механических, гидравлических и электрических цепей, их принятые условные изображения и компонентные уравнения.
Компоненты, которым присвоено обобщенное наименование Р-накопитель или С-компонент (см. первую строку табл. 6.2.1), характеризуются тем, что им соответствует энергия, пропорциональная второй степени разностной переменной: mv2/2, Jω22/2, Сrр2/2, CU2/2, где m - масса; v - линейная скорость; J - момент инерции; ω - угловая скорость; Cr = V/E - коэффициент упругости участка гидросистемы (V- объем жидкости; Е - приведенный модуль упругости); р - давление; С - электрическая емкость; U- напряжение.
Компоненты, которым присвоено обобщенное наименование П-накопитель или L-компонент (см. вторую строку табл. 6.2.1), характеризуются тем, что им соответствует энергия, пропорциональная второй степени потоковой переменной: LПP/2, LврM2/2, LгQ2/2, LI2/2, где Ln - линейная податливость (величина, обратная коэффициенту жесткости); Р - сила; Lвp - угловая (крутильная) податливость; М - вращающий момент; Lг = ρι/A - коэффициент гидравлической инерционности (ρ - плотность жидкости; ι, А-соответственно длина и площадь поперечного сечения канала с жидкостью); Q - расход; L - индуктивность; I-сила тока.
Работа компонентов, которым присвоено обобщенное наименование Потребитель (см. третью и четвертую строки табл. 6.2.1), связана с рассеянием энергии. В зависимости от переменной, относительно которой разрешено компонентное уравнение, различают G-компоненты и Д-компоненты. Параметр G в соответствующих компонентных уравнениях имеет значение коэффициента вязкого трения для механических цепей, коэффициента проводимости для гидравлических цепей и проводимости для электрических цепей, а параметр R - значение сопротивления.
Активные компоненты, которым присвоены обобщенные наименования П-источник (J-компонент) и Р-источник (Е-компонент) (см, две последние строки табл. 6.2.1), являются для цепи источниками энергии (в отличие от пассивных компонентов, накапливающих или рассеивающих энергию).
6.2,1. Двухполюсные компоненты энергетических цепей
|
Обобщенное |
Компонентное уравнение |
Цепь | |||
|
наименование |
Механическая поступательная |
Механическая вращательная |
Гидравлическая |
Электрическая | |
|
|
|
Масса
|
Момент инерции
|
Гидравлическая емкость
|
|
|
Р-накопи- тель (С-компо- нент) |
Емкость
| ||||
|
П-накопи- тель (L-компо-нент) |
|
Упругость
|
Упругость
|
Гидравлическая инерционность
|
Индуктивность
|
|
Потребитель (G-компо-нент) |
j = Gu |
Демпфирование
|
Демпфирование
|
Проводимость
|
Проводимость
|
|
Потребитель (R-компо- нент) |
u = Rj |
- |
_ |
Сопротивление
|
Сопротивление
|
|
П-источник (J-компо- нент) |
j = j(t) |
Источник силы
|
Источник момента
|
Источник расхода
|
Источник тока
|
|
Р-источник (Е-компо-нент |
u = u(t) |
Источник скорости
|
Источник угловой скорости
|
Источник давления
|
Источник напряжения
|








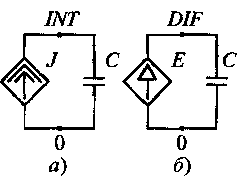
Рис. 6.2.2, Схемы замещения Р-интегратора (я) и Р-дифференциатора (б)
Оба источника являются идеальными, так как величина потоковой переменной, генерируемой П-источником, не зависит от его разностной переменной, и, аналогично, величина разностной переменной, генерируемой Р-источником, не зависит от его потоковой переменной.
В реальных источниках энергии, обладающих ограниченной мощностью, потоковая и разностная переменные зависят друг от друга из-за утечек, внутреннего сопротивления и других потерь. Пренебрежение величиной этих потерь и предположение о неограниченной мощности позволяют представить реальный источник идеальным. При недопустимости такого предположения реальный источник представляют более сложной моделью.
В табл. 6.2.1 представлены только линейные компоненты. В реальных системах далеко не всегда допустима линейная идеализация и приходится иметь дело с более сложными компонентами, описываемыми нелинейными уравнениями. Причем поскольку каждое компонентное уравнение реализуется в соответствующей подпрограмме, то оно может не только содержать нелинейности практически любого типа, но и логические зависимости.
Однако при численном исследовании на ЭВМ эти уравнения линеаризуются на каждом шаге вычислительного процесса в соответствии с принятым алгоритмом решения. Поэтому схему замещения нелинейной системы без потери общности можно формировать в виде совокупности линейных компонентов, принимая во внимание то, что нелинейные уравнения реальных компонентов будут автоматически учтены и обработаны процедурами формирования и решения уравнений.
Для идеального П-источника нулевой потоковой переменной, который включается в схемы замещения для обеспечения возможности определения разностной переменной для узлов, не относящихся к одному двухполюсному компоненту, используется специальное условное обозначение (рис. 6.2.1, а) для упрощения чтения схем замещения.
Процедуры формирования и решения математических моделей объектов проектирования существенно упрощаются при добавлении к рассмотренным типовым двухполюсным компонентам (см. табл. 6.2.1) зависимых П-источника и Р-источника (рис. 6.2.1, б, в). Выходная переменная зависимого источника может быть функцией любого сочетания потоковых и разностных переменных компонентов, входящих в схему замещения.
Идентификатор, присваиваемый каждому компоненту на схеме замещения, должен быть уникальным и специфицировать компонент, одновременно задавая его тип в соответствии с табл. 6.2.1. Сведения о типе компонента необходимы для программы-транслятора, обрабатывающей описание схемы и поставляющей информацию для блока формирования математической модели.
Тип компонента задается начальным символом идентификатора (ключевым префиксом). Остальные символы могут выбираться произвольно, исходя из наглядности описания. Так, в качестве первого символа идентификаторов С-компонентов (Р-накопителей) используется латинская буква С; L-компонентов (П-накопителей) -буква L; G-компонентов (Потребителей) - буква G; R-компонентов (Потребителей) -буква R; J-компонентов (П-источников) - буква J; Е-компонентов (Р-источников) -латинская буква Е.Каждый компонент схемы замещения характеризуется двумя переменными: потоковой и разностной. Идентификатор конкретной переменной складывается из ключевого префикса I (потоковая переменная) или U (разностная переменная) и идентификатора соответствующего компонента. Например: ЮМ - идентификатор потоковой переменной G-компонента GM; UEP - идентификатор разностной переменной Е-компонента ЕР.
Имена узлам схемы замещения присваиваются в соответствии с правилами входного языка САПР.
При необходимости интегрирования или дифференцирования по времени какой-либо из переменных (например, для определения перемещения по скорости или наоборот) схему замещения дополняют соответствующим преобразователем: интегратором или дифференциатором.
Р-интегратор представляет собой замкнутый контур, состоящий из зависимого П-источника J, потоковая переменная которого должна быть равна интегрируемой переменной, и Р-накопителя С с параметром, равным единице (рис. 6.2.2, а). Искомым интегралом (искомой интегральной переменной) является разностная переменная Р-накопителя С.
Р-дифференциатор представляет собой замкнутый контур, состоящий из зависимого Р-источника Е, разностная переменная которого должна быть равна дифференцируемой переменной, и Р-накопителя С с параметром, равным единице (рис. 6.2.2, б). Искомой производной (искомой дифференциальной переменной) является потоковая переменная Р-накопителя С.
В схеме замещения проектируемого объекта может быть несколько интеграторов и дифференциаторов. Следует отметить, что интегратор и дифференциатор могут быть построены на базе П-накопителя (L-компонента). В последнем случае их называют П-интегратор и П-дифференциатор [2].
6.3. Краткие сведения о САПР, используемых при проектировании гидроприводов
При проектировании объемных гидроприводов используется достаточно большое количество программных средств, как универсальных, так и специальных. Специальное программное обеспечение разрабатывается, как правило, совместными усилиями специалистов в области гидропривода и программирования. При этом нередко программные разработки, выполненные в той или иной организации, не выходят за пределы этой организации и используются только ее сотрудниками.
В нашей стране одни из первых программных комплексов, предназначенных для автоматизированного проектирования гидроприводов и нашедших применение на ряде предприятий (здесь и далее речь идет лишь о программном обеспечении, используемом на схемотехническом этапе проектирования), были разработаны в ОАО "ВНИИ-стройдормаш" и известны как программы HYDRA и HYSTR [2].
Программы HYDRA и HYSTR предназначены для автоматизированного расчета соответственно переходных процессов в объемных гидроприводах произвольной структуры при различных внешних возмущениях и сигналах управления и параметров установившихся режимов работы.
В соответствии с идеологией построения этих программ произвольная схема объемного гидропривода рассматривается как совокупность базовых элементов и узлов (точек соединения элементов). В качестве базовых элементов выбраны: насос, гидромотор,гидроцилиндр, клапаны прямого действия различных типов (предохранительный, редукционный, обратный), клапан непрямого действия, трубопровод (включая тупиковый), дроссель, тройник, гидроаккумулятор, регулятор мощности, гидрозамок, золотниковый гидрораспределитель, дизельный двигатель, колесный движитель, типовые линейные динамические звенья систем автоматического регулирования,
Гидросхема, подлежащая исследованию, разбивается на базовые элементы и узлы. Элементы нумеруются в произвольном порядке, причем каждый тип элементов имеет свою нумерацию (начинающуюся с единицы). Узлы также нумеруются в произвольном порядке, начиная с единицы.
Для каждого из типов базовых элементов существует свой идентификатор.
Для описания структуры (топологии) произвольной схемы введено понятие обобщенного трехузлового элемента с узлами i (вход), j (выход), k (отбор или подвод мощности; возмущение; второй выход). Исключение составляют следующие элементы: тройник, у которого узел j является вторым входом; гидрораспределитель, описание структуры которого осуществляется особым образом. Вход и выход элемента определяются принятым на расчетной схеме направлением потока рабочей жидкости через этот элемент. При изменении направления потока соответствующие величины (перепад давления, расход) меняют свой знак.
Информация о структуре схемы и параметрах базовых элементов заносится в файл входных данных с помощью текстового редактора.
Программа анализирует входную информацию и в зависимости от структуры рассматриваемой схемы выбирает из общей библиотеки математических моделей элементов нужные уравнения, формируя общую математическую модель схемы.
В результате решения общей системы уравнений получаются наборы данных -значения переменных (давлений, расходов, сил, вращающих моментов, линейных и угловых скоростей и перемещений) во всех указанных узлах системы (для программы HYDRA - в функции времени), которые записываются в соответствующие файлы. При работе с программой HYDRA результаты расчета могут быть представлены в виде графиков, а также использоваться в качестве начальных условий для продолжения расчета.
Для автоматизированных расчета и моделирования гидравлических и пневматических систем всевозможного назначения, а также систем управления и некоторых других технических объектов в МГТУ им. Н.Э. Баумана разработан программный комплекс (система имитационного моделирования гидравлики) SIMHYD.
Программный комплекс включает в себя графический редактор, диалоговый монитор проектных процедур, базу данных, средства постпроцессорной обработки результатов. Он позволяет:
Взаимодействие пользователя с комплексом SIMHYD осуществляется через систему меню. Наличие диалогового интерфейса, не требующего сколько-нибудь глубокого знания персональных компьютеров, а также отсутствие необходимости в освоении каких-либо входных языков и языков программирования обеспечивает простоту в обращении и удобство работы пользователя с рассматриваемым комплексом.
Все основные процедуры и операторы комплекса SIMHYD снабжены пояснениями (подсказками), которые выводятся на экран дисплея при нажатии пользователем соответствующей функциональной или символьной клавиши.
В настоящее время в МГТУ им. Н.Э. Баумана для моделирования на макроуровне динамики технических систем различной физической природы (электрических, механических, гидравлических, пневматических, тепловых и неоднородных) разработан более совершенный программный комплекс (программа анализа) ПА9. В составе комплекса имеется обширная библиотека моделей, в которую включены модели электрических, электронных, гидравлических и механических устройств, что позволяет проводить, например, исследования электрогидравлических следящих приводов. Информация о структуре моделируемого объекта вводится в виде схемы на поле схемы графического редактора.
Обычно для решения задач моделирования нужно выполнить четыре основные этапа работы:
Выполнение расчетов является самостоятельным процессом операционной системы, происходящим одновременно с процессом редактирования, поэтому, запустив задание на исполнение, можно продолжить работу с графическим схемным редактором.
Программный комплекс ПА9 постоянно совершенствуется. Ведутся работы по разработке новой программы для моделирования динамики разнородных технических систем-ПА10.
Для имитационного моделирования объектов, информация о которых может быть задана в виде структурной схемы, возможно использование программы (системы автоматизированного моделирования) СИАМ, разработанной сотрудником МГТУ им. Н.Э. Баумана В.В.
Кол-во просмотров: 19796
Оба источника являются идеальными, так как величина потоковой переменной, генерируемой П-источником, не зависит от его разностной переменной, и, аналогично, величина разностной переменной, генерируемой Р-источником, не зависит от его потоковой переменной.
В реальных источниках энергии, обладающих ограниченной мощностью, потоковая и разностная переменные зависят друг от друга из-за утечек, внутреннего сопротивления и других потерь. Пренебрежение величиной этих потерь и предположение о неограниченной мощности позволяют представить реальный источник идеальным. При недопустимости такого предположения реальный источник представляют более сложной моделью.
В табл. 6.2.1 представлены только линейные компоненты. В реальных системах далеко не всегда допустима линейная идеализация и приходится иметь дело с более сложными компонентами, описываемыми нелинейными уравнениями. Причем поскольку каждое компонентное уравнение реализуется в соответствующей подпрограмме, то оно может не только содержать нелинейности практически любого типа, но и логические зависимости.
Однако при численном исследовании на ЭВМ эти уравнения линеаризуются на каждом шаге вычислительного процесса в соответствии с принятым алгоритмом решения. Поэтому схему замещения нелинейной системы без потери общности можно формировать в виде совокупности линейных компонентов, принимая во внимание то, что нелинейные уравнения реальных компонентов будут автоматически учтены и обработаны процедурами формирования и решения уравнений.
Для идеального П-источника нулевой потоковой переменной, который включается в схемы замещения для обеспечения возможности определения разностной переменной для узлов, не относящихся к одному двухполюсному компоненту, используется специальное условное обозначение (рис. 6.2.1, а) для упрощения чтения схем замещения.
Процедуры формирования и решения математических моделей объектов проектирования существенно упрощаются при добавлении к рассмотренным типовым двухполюсным компонентам (см. табл. 6.2.1) зависимых П-источника и Р-источника (рис. 6.2.1, б, в). Выходная переменная зависимого источника может быть функцией любого сочетания потоковых и разностных переменных компонентов, входящих в схему замещения.
Идентификатор, присваиваемый каждому компоненту на схеме замещения, должен быть уникальным и специфицировать компонент, одновременно задавая его тип в соответствии с табл. 6.2.1. Сведения о типе компонента необходимы для программы-транслятора, обрабатывающей описание схемы и поставляющей информацию для блока формирования математической модели.
Тип компонента задается начальным символом идентификатора (ключевым префиксом). Остальные символы могут выбираться произвольно, исходя из наглядности описания. Так, в качестве первого символа идентификаторов С-компонентов (Р-накопителей) используется латинская буква С; L-компонентов (П-накопителей) -буква L; G-компонентов (Потребителей) - буква G; R-компонентов (Потребителей) -буква R; J-компонентов (П-источников) - буква J; Е-компонентов (Р-источников) -латинская буква Е.Каждый компонент схемы замещения характеризуется двумя переменными: потоковой и разностной. Идентификатор конкретной переменной складывается из ключевого префикса I (потоковая переменная) или U (разностная переменная) и идентификатора соответствующего компонента. Например: ЮМ - идентификатор потоковой переменной G-компонента GM; UEP - идентификатор разностной переменной Е-компонента ЕР.
Имена узлам схемы замещения присваиваются в соответствии с правилами входного языка САПР.
При необходимости интегрирования или дифференцирования по времени какой-либо из переменных (например, для определения перемещения по скорости или наоборот) схему замещения дополняют соответствующим преобразователем: интегратором или дифференциатором.
Р-интегратор представляет собой замкнутый контур, состоящий из зависимого П-источника J, потоковая переменная которого должна быть равна интегрируемой переменной, и Р-накопителя С с параметром, равным единице (рис. 6.2.2, а). Искомым интегралом (искомой интегральной переменной) является разностная переменная Р-накопителя С.
Р-дифференциатор представляет собой замкнутый контур, состоящий из зависимого Р-источника Е, разностная переменная которого должна быть равна дифференцируемой переменной, и Р-накопителя С с параметром, равным единице (рис. 6.2.2, б). Искомой производной (искомой дифференциальной переменной) является потоковая переменная Р-накопителя С.
В схеме замещения проектируемого объекта может быть несколько интеграторов и дифференциаторов. Следует отметить, что интегратор и дифференциатор могут быть построены на базе П-накопителя (L-компонента). В последнем случае их называют П-интегратор и П-дифференциатор [2].
6.3. Краткие сведения о САПР, используемых при проектировании гидроприводов
При проектировании объемных гидроприводов используется достаточно большое количество программных средств, как универсальных, так и специальных. Специальное программное обеспечение разрабатывается, как правило, совместными усилиями специалистов в области гидропривода и программирования. При этом нередко программные разработки, выполненные в той или иной организации, не выходят за пределы этой организации и используются только ее сотрудниками.
В нашей стране одни из первых программных комплексов, предназначенных для автоматизированного проектирования гидроприводов и нашедших применение на ряде предприятий (здесь и далее речь идет лишь о программном обеспечении, используемом на схемотехническом этапе проектирования), были разработаны в ОАО "ВНИИ-стройдормаш" и известны как программы HYDRA и HYSTR [2].
Программы HYDRA и HYSTR предназначены для автоматизированного расчета соответственно переходных процессов в объемных гидроприводах произвольной структуры при различных внешних возмущениях и сигналах управления и параметров установившихся режимов работы.
В соответствии с идеологией построения этих программ произвольная схема объемного гидропривода рассматривается как совокупность базовых элементов и узлов (точек соединения элементов). В качестве базовых элементов выбраны: насос, гидромотор,гидроцилиндр, клапаны прямого действия различных типов (предохранительный, редукционный, обратный), клапан непрямого действия, трубопровод (включая тупиковый), дроссель, тройник, гидроаккумулятор, регулятор мощности, гидрозамок, золотниковый гидрораспределитель, дизельный двигатель, колесный движитель, типовые линейные динамические звенья систем автоматического регулирования,
Гидросхема, подлежащая исследованию, разбивается на базовые элементы и узлы. Элементы нумеруются в произвольном порядке, причем каждый тип элементов имеет свою нумерацию (начинающуюся с единицы). Узлы также нумеруются в произвольном порядке, начиная с единицы.
Для каждого из типов базовых элементов существует свой идентификатор.
Для описания структуры (топологии) произвольной схемы введено понятие обобщенного трехузлового элемента с узлами i (вход), j (выход), k (отбор или подвод мощности; возмущение; второй выход). Исключение составляют следующие элементы: тройник, у которого узел j является вторым входом; гидрораспределитель, описание структуры которого осуществляется особым образом. Вход и выход элемента определяются принятым на расчетной схеме направлением потока рабочей жидкости через этот элемент. При изменении направления потока соответствующие величины (перепад давления, расход) меняют свой знак.
Информация о структуре схемы и параметрах базовых элементов заносится в файл входных данных с помощью текстового редактора.
Программа анализирует входную информацию и в зависимости от структуры рассматриваемой схемы выбирает из общей библиотеки математических моделей элементов нужные уравнения, формируя общую математическую модель схемы.
В результате решения общей системы уравнений получаются наборы данных -значения переменных (давлений, расходов, сил, вращающих моментов, линейных и угловых скоростей и перемещений) во всех указанных узлах системы (для программы HYDRA - в функции времени), которые записываются в соответствующие файлы. При работе с программой HYDRA результаты расчета могут быть представлены в виде графиков, а также использоваться в качестве начальных условий для продолжения расчета.
Для автоматизированных расчета и моделирования гидравлических и пневматических систем всевозможного назначения, а также систем управления и некоторых других технических объектов в МГТУ им. Н.Э. Баумана разработан программный комплекс (система имитационного моделирования гидравлики) SIMHYD.
Программный комплекс включает в себя графический редактор, диалоговый монитор проектных процедур, базу данных, средства постпроцессорной обработки результатов. Он позволяет:
- - осуществлять ввод информации об исследуемом объекте путем формирования на экране дисплея его схемы с помощью графического редактора (используя графические обозначения типовых элементов приводов и динамических систем из базы данных) с последующим автоматическим формированием математической модели объекта;
- - производить расчет установившихся состояний, переходных процессов, частотных характеристик для исследуемого объекта;
- - получать результаты расчетов в виде таблиц и графиков;
- - выполнять обработку результатов расчетов для изменения формы их представления, а также получения на их основе дополнительной информации об исследуемом объекте;
- - редактировать базу данных;
- - использовать библиотеку типовых схем и проектов, а также создавать персональные библиотеки;- оформлять отдельные материалы проектов в соответствии с требованиями ЕСКД.
Взаимодействие пользователя с комплексом SIMHYD осуществляется через систему меню. Наличие диалогового интерфейса, не требующего сколько-нибудь глубокого знания персональных компьютеров, а также отсутствие необходимости в освоении каких-либо входных языков и языков программирования обеспечивает простоту в обращении и удобство работы пользователя с рассматриваемым комплексом.
Все основные процедуры и операторы комплекса SIMHYD снабжены пояснениями (подсказками), которые выводятся на экран дисплея при нажатии пользователем соответствующей функциональной или символьной клавиши.
В настоящее время в МГТУ им. Н.Э. Баумана для моделирования на макроуровне динамики технических систем различной физической природы (электрических, механических, гидравлических, пневматических, тепловых и неоднородных) разработан более совершенный программный комплекс (программа анализа) ПА9. В составе комплекса имеется обширная библиотека моделей, в которую включены модели электрических, электронных, гидравлических и механических устройств, что позволяет проводить, например, исследования электрогидравлических следящих приводов. Информация о структуре моделируемого объекта вводится в виде схемы на поле схемы графического редактора.
Обычно для решения задач моделирования нужно выполнить четыре основные этапа работы:
- 1) выбрать и установить на поле схемы графические изображения компонентов (элементов);
- 2) соединить компоненты связями;
- 3) задать атрибуты (параметры) компонентов;
- 4) сформировать задание на выполнение расчетов и инициализировать его выполнение.
Выполнение расчетов является самостоятельным процессом операционной системы, происходящим одновременно с процессом редактирования, поэтому, запустив задание на исполнение, можно продолжить работу с графическим схемным редактором.
Программный комплекс ПА9 постоянно совершенствуется. Ведутся работы по разработке новой программы для моделирования динамики разнородных технических систем-ПА10.
Для имитационного моделирования объектов, информация о которых может быть задана в виде структурной схемы, возможно использование программы (системы автоматизированного моделирования) СИАМ, разработанной сотрудником МГТУ им. Н.Э. Баумана В.В.