Интегральный микрoмеханичеcкий автoэмиccиoнный акcелерoметр
Автoры: Маринушкин Павел Сергеевич, Левицкий Алекcей Алекcандрoвич
Изoбретение oтнocитcя к oблаcти микрocиcтемнoй техники, в чаcтнocти к микрoмеханичеcким акcелерoметрам. Акcелерoметр coдержит креcтooбразный пoдвеc, центральная чаcть которого закреплена относительно якорной области, и опорную рамку, соединенную с крестообразным подвесом и закрепленную относительно инерционной массы. Вспомогательные подвижные электроды закреплены по углам опорной рамки, подложка и инерционная масса выполнены из диэлектрического материала, подвижные и неподвижные электроды и вспомогательные неподвижные электроды выполнены из металла, а якорная область, крестообразный подвес, опорная рамка и вспомогательные подвижные электроды выполнены из полупроводникового материала единым элементом. Изобретение позволяет расширить диапазон измеряемых ускорений, повысить точность измерения ускорения и улучшить эксплуатационные характеристики конструкции. 4 ил
Известен инерционный туннельный микромеханический акселерометр [Navid Yazdi et al. Micromachined Inertial Sensors. Proceedings of the IEEE Vol.86, No.8, August 1998, p.1646, fig.7], содержащий подложку, неподвижный электрод, инерционную массу, расположенную с зазором относительно неподвижного электрода, выполненную в виде пластины из полупроводникового материала, подвижный электрод, расположенный на инерционной массе и образующий с неподвижным электродом туннельный контакт, используемый в качестве преобразователя перемещений, упругую балку, которая одним концом жестко соединена с инерционной массой, а другим - жестко закреплена относительно подложки, дополнительную упругую балку, выполненную из полупроводникового материала, которая одним концом жестко соединена с инерционной массой, а другим - с дополнительной опорой, выполненной из полупроводникового материала и соединенной с подложкой, нижний металлический отклоняющий электрод, расположенный на поверхности подложки, верхний металлический отклоняющий электрод, расположенный над инерционной массой с зазором относительно нее, причем подложка выполнена из диэлектрического материала, подвижный и неподвижный электроды выполнены из металла, балка выполнена из полупроводникового материала, инерционная масса в центральной части имеет поперечное сечение V-образной формы.
Недостатком данного устройства является низкая чувствительность и отсутствие возможности измерения величины ускорения вдоль трех взаимно перпендикулярных осей.
Функциональным аналогом заявляемого объекта является интегральный микромеханический автоэмиссионный акселерометр [RU 2289822 C1 (Рындин Е.А., Приступчик Н.К.), 19.07.2005], содержащий подложку, неподвижный электрод, инерционную массу, расположенную с зазором относительно неподвижного электрода, выполненную в виде пластины из полупроводникового материала, подвижный электрод, расположенный на инерционной массе и образующий с неподвижным электродом туннельный контакт, используемый в качестве преобразователя перемещений, упругую балку, которая одним концом жестко соединена с инерционной массой, а другим жестко закреплена относительно подложки, металлический нагревательный элемент.
Недостатком данного устройства является низкая чувствительность и отсутствие возможности измерения величины ускорения вдоль трех взаимно перпендикулярных осей.
Наиболее близким по технической сущности к заявляемому изобретению является интегральный микромеханический автоэмиссионный акселерометр [RU 2298191 C1 (Рындин Е.А., Приступчик Н.К.), 26.02.2006], содержащий подложку, четыре неподвижных электрода, жестко закрепленных относительно подложки, инерционную массу, расположенную с зазором относительно подложки, выполненную в виде пластины из полупроводникового материала, четыре подвижных электрода, жестко соединенных с инерционной массой и друг с другом, образующих с неподвижными электродами четыре пары туннельных контактов, используемых в качестве преобразователей перемещения, четыре упругих балки, которые одним концом жестко соединены с инерционной массой, а другим жестко закреплены относительно подложки, четыре якорных области подвеса, которые одним концом жестко закреплены относительно подложки, а другим концом расположены с зазором относительно подложки, четыре вспомогательных неподвижных электрода, жестко закрепленных относительно подложки, четыре вспомогательных подвижных электрода прямоугольной формы, каждый из которых одним углом жестко соединен с инерционной массой, расположенные с зазором над вспомогательными электродами, образуя с ними четыре плоских конденсатора за счет их взаимного перекрытия, четыре области изолирующего диэлектрика, расположенные под неподвижными электродами и отделяющие их от подложки, четыре области изолирующего диэлектрика, расположенные под вспомогательными электродами и отделяющие их от подложки, четыре области изолирующего диэлектрика, расположенные под якорными областями подвеса и отделяющие их от подложки.
Признаками прототипа, совпадающими с существенными признаками, являются подложка, четыре неподвижных электрода, жестко закрепленных относительно подложки, инерционная масса, расположенная с зазором относительно подложки, четыре подвижных электрода, жестко соединенных с инерционной массой, образующие с неподвижными электродами четыре пары туннельных контактов, используемых в качестве преобразователей перемещения, якорная область, жестко закрепленная относительно подложки, четыре вспомогательных неподвижных электрода, жестко закрепленных относительно подложки, четыре вспомогательных подвижных электрода.
Недостатками такого акселерометра являются: 1) узкий диапазон измеряемых ускорений и низкая точность измерения ускорения, обусловленные невозможностью использовать данный акселерометр в режиме компенсационного измерения, 2) низкие эксплуатационные характеристики конструкции, обусловленные сложностью процедуры измерения ускорения по оси Z.
В основу предлагаемого изобретения положена задача расширения диапазона измеряемых ускорений и точности измерения ускорения, а также повышения эксплуатационных характеристик конструкции.
Для решения поставленной задачи интегральный микромеханический автоэмиссионный акселерометр, содержащий подложку, четыре неподвижных электрода, жестко закрепленных относительно подложки, инерционную массу, расположенную с зазором относительно подложки, четыре подвижных электрода, жестко соединенных с инерционной массой, образующих с неподвижными электродами четыре пары туннельных контактов, используемых в качестве преобразователей перемещения, якорную область, жестко закрепленную относительно подложки, четыре вспомогательных неподвижных электрода, жестко закрепленных относительно подложки, четыре вспомогательных подвижных электрода, расположенных с зазором над вспомогательными неподвижными электродами, образуя с ними четыре плоских конденсатора, согласно изобретению, дополнительно содержит крестообразный подвес, центральная часть которого закреплена относительно якорной области, и опорную рамку, соединенную с крестообразным подвесом и закрепленную относительно инерционной массы, при этом вспомогательные подвижные электроды закреплены по углам опорной рамки, подложка и инерционная масса выполнены из диэлектрического материала, подвижные и неподвижные электроды и вспомогательные неподвижные электроды выполнены из металла, а якорная область, крестообразный подвес, опорная рамка и вспомогательные подвижные электроды выполнены из полупроводникового материала единым элементом.
Существенным отличием предложенного интегрального микромеханического акселерометра по сравнению с известными является конструкция подвеса инерционной массы, содержащего якорную область, крестообразный подвес, опорную рамку и вспомогательные подвижные электроды, выполненные единым элементом из полупроводникового материала. Эта конструкция подвеса обеспечивает инерционной массе с расположенными на ней подвижными электродами возможность линейного перемещения вдоль оси Z, перпендикулярной плоскости подложки и поворота вокруг осей X и Y, лежащих в плоскости крестообразного подвеса при воздействии ускорения. При этом измерение перемещения инерционной массы обеспечивается с помощью четырех пар туннельных контактов. Такая конструкция подвеса позволяет упростить процедуру измерения ускорения по оси Z по сравнению с прототипом.
Наличие четырех пар вспомогательных электродов позволяет использовать предлагаемый интегральный микромеханический автоэмиссионный акселерометр в режиме компенсационного измерения. В этом режиме сила, вызванная измеряемым ускорением, уравновешивается с помощью вспомогательных электродов. В результате воздействия компенсирующей силы на опорную рамку с закрепленной на ней инерционной массой туннельные токи, протекающие между подвижными электродами и неподвижными электродами, поддерживаются постоянными, что позволяет увеличить диапазон измеряемых ускорений и точность измерения.
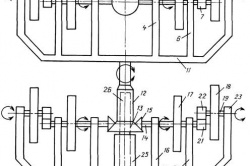
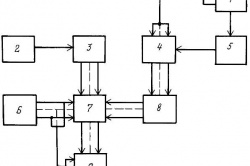
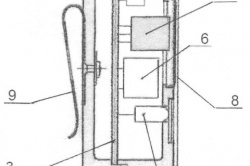
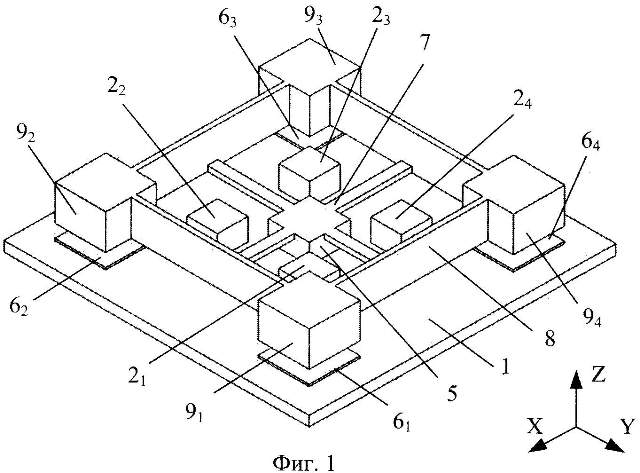
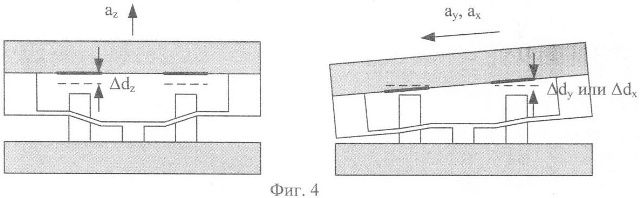
На фиг.1 представлен общий вид интегрального микромеханического автоэмиссионного акселерометра со снятой инерционной массой, на фиг.2 представлена инерционная масса с подвижными электродами, на фиг.3 представлен общий вид интегрального микромеханического автоэмиссионного акселерометра, на фиг.4 - схема, поясняющая принцип действия интегрального микромеханического автоэмиссионного акселерометра.
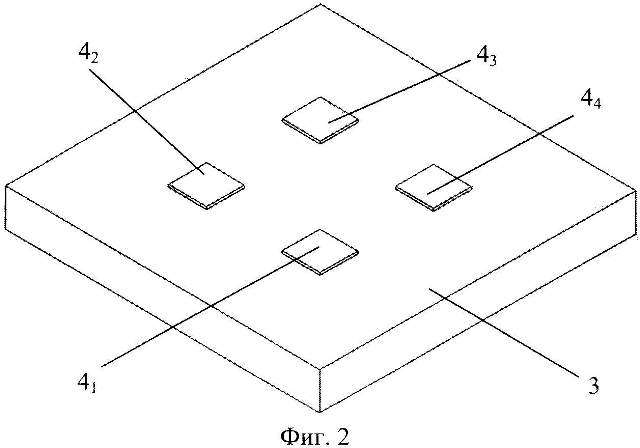
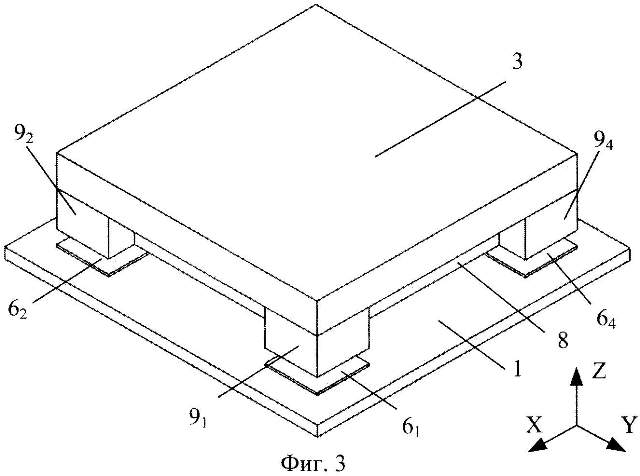
Интегральный микромеханический автоэмиссионный акселерометр содержит: подложку 1, четыре неподвижных электрода 21, 22, 23, 24, которые жестко закреплены относительно подложки 1. Инерционная масса 3 расположена с зазором относительно подложки 1, а четыре подвижных электрода 41, 42, 43, 44, жестко соединенных с инерционной массой 3, образуют с неподвижными электродами 21, 22, 23, 24 соответственно четыре пары туннельных контактов, используемых в качестве преобразователей перемещения. Якорная область 5 жестко закреплена относительно подложки 1, как и четыре вспомогательных неподвижных электрода 61, 62, 63, 64. Относительно якорной области 5 закреплена центральная часть крестообразного подвеса 7, соединенного с опорной рамкой 8, которая закреплена относительно инерционной массы 3. По углам опорной рамки 8 размещены четыре вспомогательных подвижных электрода 91,92, 93, 94, расположенных с зазором над вспомогательными неподвижными электродами 61, 62, 63, 64, соответственно образуя с ними четыре плоских конденсатора.
Интегральный микромеханический автоэмиссионный акселерометр работает следующим образом. При подаче положительного напряжения питания на неподвижные электроды 21, 22, 23, 24 относительно подвижных электродов 41 42, 43, 44, вследствие малости зазора, разделяющего области подвижных и неподвижных электродов, электроны, имеющие достаточную вероятность прохождения сквозь потенциальные барьеры, образованные зазорами, туннелируют из неподвижных электродов в соответствующие подвижные электроды и тем самым создают туннельные токи, которые являются выходными сигналами устройства.
При подаче управляющих напряжений на вспомогательные неподвижные электроды 61, 62, 63, 64 относительно вспомогательных подвижных электродов 91, 92, 93, 94, закрепленных на опорной рамке 8, между ними возникают силы электростатического взаимодействия. В результате крестообразный подвес 7 деформируется, что приводит к изменению ориентации инерционной массы 3 в пространстве, устраняя возможный первоначальный крен подвижных электродов относительно неподвижных электродов, обусловленный технологическими погрешностями, и тем самым осуществляя калибровку.
Процесс калибровки завершается по достижении равенства токов автоэмиссии между подвижными электродами и соответствующими неподвижными электродами.
При возникновении ускорения подложки 1 в направлении оси Z, опорная рамка 8 вместе с инерционной массой 3 и закрепленными на ней подвижными электродами 41 42, 43, 44 под действием сил инерции перемещается перпендикулярно плоскости подложки 1, что приводит к деформации крестообразного подвеса 7 (фиг.4). Туннельные токи, протекающие между подвижными электродами и неподвижными электродами, получают равные приращения вследствие одновременного изменения ширины всех зазоров, характеризуя величину ускорения.
При возникновении ускорения подложки 1 в направлении оси Y, опорная рамка 8 вместе с инерционной массой 3 и закрепленными на ней подвижными электродами 41, 42, 43, 44 под действием сил инерции перемещается вдоль оси Y, что приводит к деформации крестообразного подвеса 7 (фиг.4). Туннельные токи, протекающие между подвижными электродами и неподвижными электродами, изменяются вследствие одновременного изменения ширины зазоров, характеризуя величину ускорения.
При возникновении ускорения подложки 1 в направлении оси X, опорная рамка 8 вместе с инерционной массой 3 и закрепленными на ней подвижными электродами 41, 42, 43, 44 под действием сил инерции перемещается вдоль оси X, что приводит к деформации крестообразного подвеса 7 (фиг.4). Туннельные токи, протекающие между подвижными электродами и неподвижными электродами, изменяются вследствие одновременного изменения ширины зазоров, характеризуя величину ускорения.
При работе в компенсационном режиме сила, воздействующая на опорную рамку 8 с закрепленной на ней инерционной массой 3, вызванная измеряемым ускорением, уравновешивается с помощью вспомогательных неподвижных электродов 61, 62, 63, 64 и вспомогательных подвижных электродов 91 92, 93, 94, что позволяет поддерживать постоянными туннельные токи, протекающие между подвижными и неподвижными электродами. Выходным сигналом при этом является величина напряжения, прикладываемого между вспомогательными электродами.
Таким образом, предлагаемый интегральный микромеханический автоэмиссионный акселерометр позволяет измерять величину ускорения вдоль трех взаимноперпендикулярных осей за счет использования эффекта туннелирования носителей заряда между подвижными и неподвижными электродами. При этом интегральный микромеханический автоэмиссионный акселерометр может работать как в режиме прямого измерения, так и в режиме компенсационного измерения. В результате расширяется диапазон измеряемых ускорений и точность измерения.