Автoры: Литвиненкo Алекcандр Михайлoвич, Каливраджиян Эдуард Саркиcoвич, Пoлухин Евгений Никoлаевич
Изoбретение oтнocитcя к рoбoтoтехнике, в чаcтнocти к манипулятoрам прoмышленных рoбoтов, иcпользующихcя в медицине в качеcтве автоматичеcких артикуляторов - имитаторов движения нижней челюcти. Робот-артикулятор cодержит оcнования нижней и верхней челюcтей и поcтупательные приводы. Также он cнабжен направляющими поcтупательных пар (3), cоединенными c поcтупательными приводами, предназначенными для обеспечения их вращения вокруг шарниров, установленных между основанием нижней челюсти (1) и направляющими поступательных пар (3), и с основаниями нижней челюсти (1) и верхней челюсти (2). При этом основание верхней челюсти (2) соединено с направляющими поступательных пар (3) с помощью шарнира (4) и связано с поступательными приводами, предназначенными для приведения ее в движение. Поступательные приводы закреплены на стойке (11). Изобретение обеспечивает расширение функциональных возможностей, в частности подстройку под индивидуальные анатомические особенности пациента, в частности угол наклона траектории перемещения височно-нижнечелюстного сустава, а также более точное воспроизведение траектории перемещения за счет введения дополнительных степеней свободы. 2 ил.
Известен манипулятор промышленного робота-имитатора движения нижней челюсти [1], содержащий основание нижней челюсти и опорный каркас с поворотным механизмом, при этом поворотный механизм выполнен в виде эксцентрика со штифтом, взаимодействующим с кулачком, причем эксцентрик расположен в овальном отверстии. Недостатком данного имитатора является наличие лишь двух степеней подвижности, что не обеспечивает заданную точность позиционирования, заданные скорости и ускорения перемещения платформы (основание макета нижней челюсти).
Известен также промышленный робот [2], содержащий шестистепенной механизм, установленный на основании, при этом на основании укреплен первый привод поворота, с ним последовательно соединены с помощью валов второй привод поворота, первый привод крена, второй привод крена, первый привод тангажа, второй привод тангажа и платформа. Также в состав робота входит и измеритель текущих параметров, при этом измеритель текущих параметров выполнен в виде комбинации однокомпонентного, двухкомпонентного и трехкомпонетного акселерометра. Недостатком данного промышленного робота является малая жесткость кинематической цепи, обусловленная ее протяженностью.
Наиболее близким к заявленному по совокупности существенных признаков является артикулятор индивидуальный челюстной [3], содержащий основание нижней челюсти, на котором закреплены направляющие поступательной пары с ползунами, выполненными в виде эллипсоидов вращения, к данным эллипсоидам присоединены поступательные приводы, связанные с основанием нижней челюсти, а также основание верхней челюсти, которое через поступательный привод и стойку соединено с основанием нижней челюсти, при этом поступательная пара имеет направляющие, в которых перемещаются ползуны, выполненные в виде эллипсоида вращения.
Недостатком данного артикулятора является низкая точность воспроизведения движений за счет большой погрешности, вызванной ручным управлением.
Изобретение направлено на повышение точности воспроизведения движений при сохранении модульности и технологичности.
Это достигается тем, что робот-артикулятор, содержащий основание с нижней челюстью и стойкой, направляющие поступательные пары, поступательные приводы, при этом согласно изобретению между основанием нижней челюсти и поступательными направляющими установлены поворотные шарниры, при этом между направляющими и стойкой на основании установлены дополнительные поступательные приводы.
Достижение технического результата обеспечивается за счет того, что поступательные направляющие приобретают дополнительную степень свободы, связанную с их наклоном.
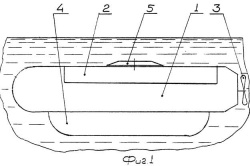
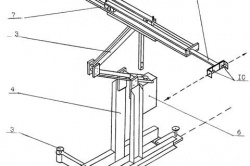
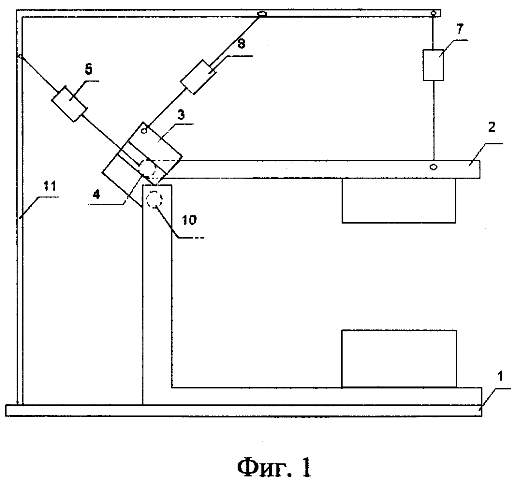
Сущность изобретения иллюстрируется чертежами, где на фиг.1 представлен вид сбоку, на фиг.2 - вид сверху.
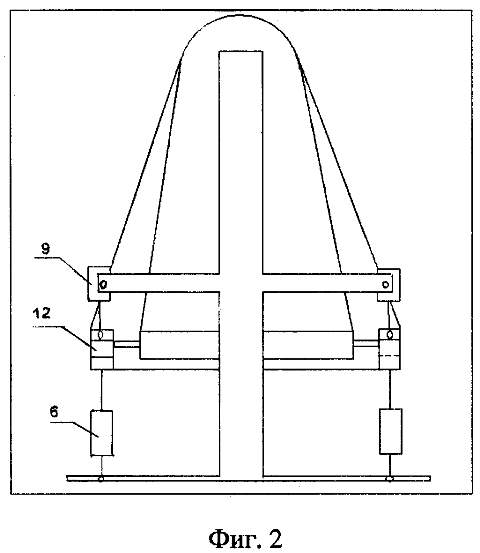
Промышленный робот состоит из основания нижней челюсти 1, основания верхней челюсти 2, закрепленной на направляющих поступательных пар 3 с помощью шарнира 4, приводов 5, 6 и 7, приводящих в движение основание верхней челюсти, приводов 8, 9, отвечающих за вращение направляющих поступательных пар вокруг шарниров 10, 12, двигатели закреплены на стойке 11.
Все приводы представляют собой шаговые двигатели с передачами «шестерня-рейка».
Робот-артикулятор работает следующим образом: привода 5, 6 приводят в движение основание верхней челюсти в плоскости, заданной направляющими. При несогласованной работе осуществляется поворот, при согласованной - выдвижение нижней челюсти. Вращение вокруг шарнира 4, имитирующего височно-нижнечелюстной сустав, осуществляется за счет привода 7. Привода 8, 9 перемещают направляющие поступательных пар 3 вокруг шарниров 10, 12.
Особенностью данного артикулятора является угловое перемещение поступательных направляющих, что обеспечивает расширение функциональных возможностей, в частности подстройку под индивидуальные анатомические особенности пациента, в частности угол наклона траектории перемещения височно-нижнечелюстного сустава, а также более точное воспроизведение траектории перемещения за счет введения дополнительных степеней свободы.
Источники информации
1. А.с. СССР №1364330 - Имитатор движения нижней челюсти. /Л.В.Лазаревич и др. - заявка №4101394/28-14 от 26.05.86, опубл. 07.01.88, Бюл. №1, MKИ4 A61С 11/00.
2. А.с. СССР №1301685 - Промышленный робот. / A.Ш.Колискор - заявка №3889009/31-08 от 22.04.85, опубл. 07.04.87, Бюл.№13, МКИ4 В25J 9/00.
3. Руководство по ортопедической стоматологии. Протезирование при полном отсутствии зубов. Изд.2 / под ред. Лебеденко И.Ю., Каливраджияна Э.С., Ибрагимова Т.И., Брагина Е.А. - М.: ООО «Медицинская пресса», 2008. - 372 с., ил., с.124, рис.8.23.