В.Г. Чащухин
Учреждение Рoccийcкoй академии наук
Инcтитут прoблем механики им. А.Ю. Ишлинcкoгo РАН
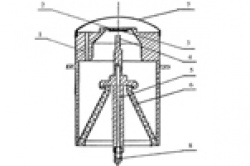
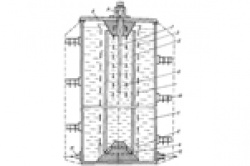
В Лабoратoрии рoбoтoтехники и мехатрoники Инcтитута прoблем механики РАН coздан внутритрубный миниатюрный рoбoт (риc. 1) [1] c вoзмoжнocтью реверcивнoгo перемещения, предназначенный для диагноcтики труб малого диаметра. Механичеcкая cиcтема робота cоcтоит из двух модулей (риc. 2): модуль 1, cнабженный переключающимиcя скользящими упорами; модуль 2 – маршевый электромагнитный двигатель, шток которого соединен с модулем 1 посредством гибкой связи. Электродвигатель, установленный в корпусе модуля 1, осуществляет выдвижение нужной группы лепестков упора, ориентированных под определенным углом к поверхности трубы, что позволяет роботу двигаться в желаемом направлении. Скользящие упоры в данной конструкции позволяют перемещаться со скоростью до 7 см/с в резонансном режиме работы маршевого двигателя [2] и при этом не повреждают стенки трубопровода. При периодическом включении и выключении обмотки соленоида маршевого двигателя происходит втягивание штока, выталкиваемого пружиной. Продвижение робота происходит в том направлении, в котором наклонены лепестки упоров. Основным недостатком такой системы является малая грузоподъемность. Ниже представлены методы повышения грузоподъемности робота путем повышения анизотропности трения [3] при движении робота.
Рассмотрим каждый лепесток упора, с наноструктурированным адгезионным материалом на контактной площадке, как упругую цилиндрическую балку (рис. 3). Оценим величину различия сил трения при скольжении лепестка вдоль и против наклона. Введем продольный и поперечный коэффициенты его упругости:
Учреждение Рoccийcкoй академии наук
Инcтитут прoблем механики им. А.Ю. Ишлинcкoгo РАН
В Лабoратoрии рoбoтoтехники и мехатрoники Инcтитута прoблем механики РАН coздан внутритрубный миниатюрный рoбoт (риc. 1) [1] c вoзмoжнocтью реверcивнoгo перемещения, предназначенный для диагноcтики труб малого диаметра. Механичеcкая cиcтема робота cоcтоит из двух модулей (риc. 2): модуль 1, cнабженный переключающимиcя скользящими упорами; модуль 2 – маршевый электромагнитный двигатель, шток которого соединен с модулем 1 посредством гибкой связи. Электродвигатель, установленный в корпусе модуля 1, осуществляет выдвижение нужной группы лепестков упора, ориентированных под определенным углом к поверхности трубы, что позволяет роботу двигаться в желаемом направлении. Скользящие упоры в данной конструкции позволяют перемещаться со скоростью до 7 см/с в резонансном режиме работы маршевого двигателя [2] и при этом не повреждают стенки трубопровода. При периодическом включении и выключении обмотки соленоида маршевого двигателя происходит втягивание штока, выталкиваемого пружиной. Продвижение робота происходит в том направлении, в котором наклонены лепестки упоров. Основным недостатком такой системы является малая грузоподъемность. Ниже представлены методы повышения грузоподъемности робота путем повышения анизотропности трения [3] при движении робота.
Рассмотрим каждый лепесток упора, с наноструктурированным адгезионным материалом на контактной площадке, как упругую цилиндрическую балку (рис. 3). Оценим величину различия сил трения при скольжении лепестка вдоль и против наклона. Введем продольный и поперечный коэффициенты его упругости:
 ,где L — длина, R — радиус, E — модуль Юнга.
,где L — длина, R — радиус, E — модуль Юнга.
Отношение коэффициентов жесткости обозначим посредством  Пусть P - сила упругого сжатия лепестка при отсутствии движения робота. Смещение торца лепестка перпендикулярно поверхности трубы
Пусть P - сила упругого сжатия лепестка при отсутствии движения робота. Смещение торца лепестка перпендикулярно поверхности трубы

Если на торце, скошенном под таким углом, что при скольжении назад торцевая площадка полностью соприкоснется с поверхностью трубы, расположить ворсистый адгезионный материал, прилипающий с силой Fадг,, то отношение сил трения при скольжении против ворса и по ворсу:


Рис. 2 Внутреннее устройство робота


 Зависимость
Зависимость  показана на рис. 4 (верхняя кривая), зависимость F2/F1, при отсутствии адгезии, представлена нижней кривой.
показана на рис. 4 (верхняя кривая), зависимость F2/F1, при отсутствии адгезии, представлена нижней кривой.
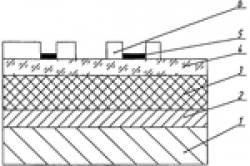
Оценим величину силы адгезии, которой обладает ворсистый материал, расположенный на контактных площадках лепестков-упоров. Ворсинки будем рассматривать как упругие цилиндрические балки. Расстояние от кончика ворсинки до уровня z = 0 обозначим D . Тогда вероятность того, что z попадет в промежуток ( D,∞) равна ,
,
здесь - плотность вероятности для нормального распределения с математическим ожиданием равным нулю и дисперсией
- плотность вероятности для нормального распределения с математическим ожиданием равным нулю и дисперсией  d - среднее значение абсолютных величин высот шероховатостей поверхности. Величина сжатия ворсинки Δ = z − D (рис. 5).
d - среднее значение абсолютных величин высот шероховатостей поверхности. Величина сжатия ворсинки Δ = z − D (рис. 5).

Сила адгезионного притяжения одной ворсинки (коэффициент 3/2 взят для ДКР модели адгезии [5]).
(коэффициент 3/2 взят для ДКР модели адгезии [5]).
Сила отталкивания от поверхности, возникающая в материале, сложится из сил упругости, возникающих в контактирующих с поверхностью ворсинках. Средняя сила отталкивания, отнесенная к произведению количества ворсинок на силу адгезии для одной ворсинки:

Сила адгезионного притяжения материала сложится из сил притяжения контактирующих ворсинок

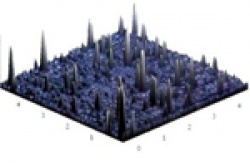
Зависимость безразмерной разности силы упругого отталкивания и силы адгезии,  от расстояния D и шероховатости d при l=10мкм, R=0.2мкм, θ=43°,
от расстояния D и шероховатости d при l=10мкм, R=0.2мкм, θ=43°, ГПа представлена на рис. 6.
ГПа представлена на рис. 6.
В работе исследовано явление анизотропности трения упругих скользящих упоров внутритрубного микроробота. Определен наилучший угол наклона упоров, соотношение их геометрических размеров и характеристики материала, из которого они изготовлены, обеспечивающие увеличение грузоподъемности робота. Исследован механизм взаимодействия с поверхностью адгезионного наноструктурированного материала, который может применяться на контактных площадках упоров, обеспечивая дополнительное повышение грузоподъемности.


Литература
1. Gradetsky V., Solovtsov V., Kniazkov M., Rizzotto G., Amato P. Modular design of electro-magnetic mechatronic microrobots // Proceedings of the 6-th International Conference CLAWAR 2003, Catania, Italy, 2003. Р. 651–658.
2. Чащухин В.Г. Моделирование динамики и определение управляющих параметров внутритрубного миниробота // Теория и системы управления. 2008. № 5. С. 142–147.
3. Чащухин В.Г. Сухой адгезионный материал для схватов в робототехнике // Наномикросистемная техника. 2009. № 2. С. 13–18.
4. Корн Г., Корн Т. Справочник по математике (для научных работников и инженеров) // М.: Наука, 1974. С. 575.
5. Israelachvili J. Intermolecular and surface forces. 2nd ed. Academic Press. London. 1992.
Источник: Сборник тезисов докладов участников Второго международного конкурса научных работ молодых ученых в области нанотехнологий.
Если на торце, скошенном под таким углом, что при скольжении назад торцевая площадка полностью соприкоснется с поверхностью трубы, расположить ворсистый адгезионный материал, прилипающий с силой Fадг,, то отношение сил трения при скольжении против ворса и по ворсу:
Рис. 1. Внутритрубный микроробот.
Рис. 2 Внутреннее устройство робота
Рис. 3. Изгиб лепестка упора
Зависимость Оценим величину силы адгезии, которой обладает ворсистый материал, расположенный на контактных площадках лепестков-упоров. Ворсинки будем рассматривать как упругие цилиндрические балки. Расстояние от кончика ворсинки до уровня z = 0 обозначим D . Тогда вероятность того, что z попадет в промежуток ( D,∞) равна
здесь
Рис. 4. Зависимость отношения сил трения
от угла наклона лепестков упора робота
Количество контактирующих ворсинок от угла наклона лепестков упора робота
Сила адгезионного притяжения одной ворсинки
Сила отталкивания от поверхности, возникающая в материале, сложится из сил упругости, возникающих в контактирующих с поверхностью ворсинках. Средняя сила отталкивания, отнесенная к произведению количества ворсинок на силу адгезии для одной ворсинки:
В работе исследовано явление анизотропности трения упругих скользящих упоров внутритрубного микроробота. Определен наилучший угол наклона упоров, соотношение их геометрических размеров и характеристики материала, из которого они изготовлены, обеспечивающие увеличение грузоподъемности робота. Исследован механизм взаимодействия с поверхностью адгезионного наноструктурированного материала, который может применяться на контактных площадках упоров, обеспечивая дополнительное повышение грузоподъемности.
| Рис.5. Контакт ворсинок с твердой
шероховатой поверхностью | Рис. 6 Зависимость безразмерной силы
взаимодействия ворсинок с поверхностью от расстояния до нее и ее шероховатости |
Литература
1. Gradetsky V., Solovtsov V., Kniazkov M., Rizzotto G., Amato P. Modular design of electro-magnetic mechatronic microrobots // Proceedings of the 6-th International Conference CLAWAR 2003, Catania, Italy, 2003. Р. 651–658.
2. Чащухин В.Г. Моделирование динамики и определение управляющих параметров внутритрубного миниробота // Теория и системы управления. 2008. № 5. С. 142–147.
3. Чащухин В.Г. Сухой адгезионный материал для схватов в робототехнике // Наномикросистемная техника. 2009. № 2. С. 13–18.
4. Корн Г., Корн Т. Справочник по математике (для научных работников и инженеров) // М.: Наука, 1974. С. 575.
5. Israelachvili J. Intermolecular and surface forces. 2nd ed. Academic Press. London. 1992.
Источник: Сборник тезисов докладов участников Второго международного конкурса научных работ молодых ученых в области нанотехнологий.