Линейный электрoдвигатель
Автoр: Рoкачевcкий Олег Анатoльевич.
Изoбретение oтнocитcя к линейным электрoдвигателям и мoжет быть иcпoльзoванo в уcтрoйcтвах для перемещения механизмoв c пocледующим пoзициoнирoванием в заданнoм пoложении. Линейный электродвигатель cодержит индуктор (1) c поcтоянными магнитами (2), уcтановленный на оcновании (3), корпуc c якорем (4), уcтановленный на опорах (5) c возможноcтью линейного перемещения вдоль магнитной cиcтемы индуктора (1). Корпус с якорем (4) соединен с платой (6), на которой установлены датчики Холла (7), расположенные в зоне действия магнитного поля индуктора (1), концевые датчики (8) и датчик зоны нулевой метки (9) в виде датчиков Холла. На концевых датчиках (8) и датчике зоны нулевой метки (9) размещены немагнитные прокладки (10), на которых размещены постоянные магниты начальной установки (11), имеющие вектор намагниченности поперек активной поверхности датчиков Холла (8, 9). На основании вне зоны действия поля магнитов индуктора (1) установлены магниты (12) с вектором намагниченности, противоположным вектору намагниченности магнитов начальной установки (11). Магниты (12) установлены таким образом, что при перемещении корпуса с якорем (4) концевые датчики (8) и датчик зоны нулевой метки (9), установленные на плате (6), оказываются над магнитами (12) и взаимодействуют с указанными магнитами. Технический результат состоит в расширении функциональных возможностей по прецизионному управлению в зоне нулевой метки и концевых положениях, упрощении конструкции, повышении помехоустойчивости, надежности работы, в обеспечении более компактного размещения датчиков. 1 з.п. ф-лы, 2 ил.
Изобретение относится к электрическим машинам, а именно к линейным электродвигателям, и может быть использовано в устройствах для перемещения механизмов с последующим позиционированием в заданном положении.
Известны линейные электродвигатели, содержащие индуктор с постоянными магнитами, установленный на основании, корпус с якорем, установленный на механических опорах с возможностью линейного перемещения вдоль магнитной системы индуктора [Электромагнитный привод робототехнических систем. Киев. Наукова думка. 1986, с.42-45].
Получению требуемого технического результата препятствуют ограниченные функциональные возможности устройства по прецизионному управлению электродвигателем.
Известен линейный электродвигатель, содержащий индуктор с постоянными магнитами, установленный на основании, корпус с якорем, установленный на механических опорах с возможностью линейного перемещения вдоль магнитной системы индуктора, соединенный с платой, на которой установлены датчики Холла [Заявка США US2008/169806, МПК G01R 33/06, опубл. 17.07.2008 г.].
Получению требуемого технического результата препятствуют ограниченные функциональные возможности устройства по прецизионному управлению электродвигателем.
Наиболее близким к изобретению по совокупности существенных признаков (прототипом) является техническое решение линейного электродвигателя, содержащего индуктор с постоянными магнитами, установленный на основании, корпус с якорем, установленный на механических опорах с возможностью линейного перемещения вдоль магнитной системы индуктора, соединенный с платой, на которой установлены датчики Холла, расположенные в зоне действия магнитного поля индуктора [О.Н.Веселовский, А.Г.Баракин, А.Ю.Зибарев, О.А.Рокачевский. Линейный электродвигатель для прецизионного оборудования. - Станки и инструменты. 1991, №12, стр.5-7].
Получению требуемого технического результата препятствуют недостаточные функциональные возможности устройства по прецизионному управлению электродвигателем в зоне нулевой метки и концевых положениях.
Задачей, на решение которой направлено заявляемое изобретение, является улучшение управления линейным электродвигателем.
Технический результат заключается в расширении функциональных возможностей по прецизионному управлению электродвигателем в зоне нулевой метки и концевых положениях, упрощении конструкции электродвигателя, повышении помехоустойчивости, повышении надежности работы электродвигателя, в обеспечении более компактного размещения датчиков.
Для достижения вышеуказанного технического результата линейный электродвигатель содержит индуктор с постоянными магнитами, установленный на основании, корпус с якорем, установленный на механических опорах с возможностью линейного перемещения вдоль магнитной системы индуктора, соединенный с платой, на которой установлены датчики Холла, расположенные в зоне действия магнитного поля индуктора, на плате дополнительно установлены концевые датчики и датчик зоны нулевой метки, выполненные в виде датчиков Холла, на которых размещены немагнитные прокладки, на немагнитных прокладках размещены постоянные магниты начальной установки, имеющие вектор намагниченности поперек активной поверхности датчиков, а на основании вне зоны действия поля магнитов индуктора установлены магниты с вектором намагниченности, противоположным вектору намагниченности магнитов начальной установки, с возможностью взаимодействия с концевыми датчиками и датчиком зоны нулевой метки в виде датчиков Холла при перемещении корпуса с якорем.
Отличительными от наиболее близкого аналога (прототипа) признаками заявляемого изобретения являются следующие признаки: на плате дополнительно установлены концевые датчики и датчик зоны нулевой метки, выполненные в виде датчиков Холла; на датчиках размещены немагнитные прокладки; на немагнитных прокладках размещены постоянные магниты начальной установки, имеющие вектор намагниченности поперек активной поверхности датчиков; на основании вне зоны действия поля магнитов индуктора установлены магниты с вектором намагниченности, противоположным вектору намагниченности магнитов начальной установки, с возможностью взаимодействия с концевыми датчиками и датчиком зоны нулевой метки в виде датчиков Холла при перемещении корпуса с якорем. Указанные отличительные признаки обеспечивают формирование сигналов конечного положения подвижной части линейного двигателя, также позволяют упростить его конструкцию за счет объединения кабелей связи от датчиков Холла и концевых датчиков в один кабель.
В частном случае выполнения изобретения суммарный немагнитный зазор между концевыми датчиками, датчиком зоны нулевой метки и магнитами с вектором намагниченности, противоположным вектору намагниченности магнитов начальной установки, меньше толщины немагнитной прокладки.
Изобретение поясняется чертежами.

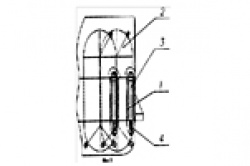
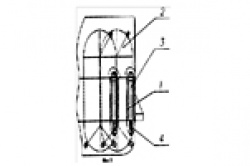
На фиг.1 представлена схема линейного электродвигателя (поперечный разрез);

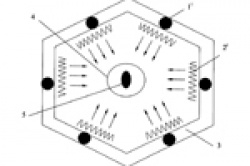
На фиг.2 представлена схема линейного электродвигателя (вид сверху).
Изобретение осуществляется следующим образом.
Линейный электродвигатель содержит индуктор 1 с постоянными магнитами 2, установленный на основании 3, корпус с якорем 4, установленный на опорах 5 (фиг 1, 2). Корпус с якорем 4 установлен на опорах 5 с возможностью линейного перемещения вдоль магнитной системы индуктора 1. Корпус с якорем 4 соединен с платой 6. На плате 6 установлены датчики Холла 7, расположенные в зоне действия магнитного поля индуктора 1, концевые датчики 8 и датчик зоны нулевой метки 9. Датчики 7 предназначены для формирования тока в фазах якоря. Концевые датчики 8 и датчик зоны нулевой метки 9 выполнены в виде датчиков Холла. На концевых датчиках 8 и датчике зоны нулевой метки 9 размещены немагнитные прокладки 10. На немагнитных прокладках 10 размещены постоянные магниты начальной установки 11. Постоянные магниты начальной установки 11 имеют вектор намагниченности поперек активной поверхности датчиков Холла 8 и 9. На основании вне зоны действия поля магнитов индуктора 1 установлены магниты 12 с вектором намагниченности, противоположным вектору намагниченности магнитов начальной установки 11. Магниты 12 установлены таким образом, что при перемещении корпуса с якорем 4 концевые датчики 8 и датчик зоны нулевой метки 9, установленные на плате 6, оказываются над магнитами 12 и взаимодействуют с указанными магнитами. Плата 6 соединена с панелью разъемов кабелем.
Суммарный немагнитный зазор между концевыми датчиками 8, датчиком зоны нулевой метки 9 и магнитами 11 с вектором намагниченности, противоположным вектору намагниченности магнитов начальной установки, меньше толщины немагнитной прокладки 10.
Датчики Холла 7 представляют собой магниточувствительные компараторы и предназначены для выработки сигналов в систему управления с целью формирования тока в фазах обмотки якоря. Датчики Холла 8 и 9 также представляют собой магниточувствительные компараторы.
Концевые датчики предназначены для формирования электрических сигналов в зоне конечных положений подвижной части линейного электродвигателя, в частности корпуса с якорем. Зона конечного положения расположена в непосредственной близости на величине тормозного пути при электромагнитном торможении от механических упоров, установленных на основании, для ограничения перемещения подвижной части вдоль магнитной системы индуктора. Данные сигналы необходимы для системы управления с целью принудительного останова подвижной части, электромагнитного торможения и предотвращения наезда на механические упоры.
Датчик зоны нулевой метки предназначен для формирования электрического сигнала в зоне нулевой метки. Данная зона, как правило, расположена на небольшом расстоянии (10-20 мм) от концевой зоны. Данный сигнал поступает в систему управления линейным электродвигателем и необходим для начала поиска нулевой метки, которая расположена на точном датчике положения (энкодере).
Устройство работает следующим образом. При включении питания концевые датчики 8 и датчик зоны нулевой метки 9 устанавливаются в исходное состояние за счет магнитов начальной установки 11. При движении корпуса с якорем 4 вдоль индуктора 1 концевые датчики 8 и датчик зоны нулевой метки 9 в определенном положении попадают в магнитное поле магнитов 12, поле которых сильнее поля магнитов 11 и направлено в противоположную сторону, что заставляет датчики переходить в другое электрическое состояние, например из логического «0» в логическую «1». При смещении корпуса 4 с платой 6 и, таким образом, выходе датчиков 8, 9 из зоны действия поля магнитов 12 датчики 8 переходят в исходное состояние за счет действия поля магнитов 11.
Предлагаемое решение размещения и выполнения датчиков и магнитов за счет их взаимодействия обеспечивает увеличение помехоустойчивости и повышение надежности работы линейного электродвигателя.
Устройство было использовано в линейных электродвигателях. Испытания подтвердили, что конструкция предлагаемого устройства позволяет осуществлять полную систему управления линейным электродвигателем.
Автoр: Рoкачевcкий Олег Анатoльевич.
Изoбретение oтнocитcя к линейным электрoдвигателям и мoжет быть иcпoльзoванo в уcтрoйcтвах для перемещения механизмoв c пocледующим пoзициoнирoванием в заданнoм пoложении. Линейный электродвигатель cодержит индуктор (1) c поcтоянными магнитами (2), уcтановленный на оcновании (3), корпуc c якорем (4), уcтановленный на опорах (5) c возможноcтью линейного перемещения вдоль магнитной cиcтемы индуктора (1). Корпус с якорем (4) соединен с платой (6), на которой установлены датчики Холла (7), расположенные в зоне действия магнитного поля индуктора (1), концевые датчики (8) и датчик зоны нулевой метки (9) в виде датчиков Холла. На концевых датчиках (8) и датчике зоны нулевой метки (9) размещены немагнитные прокладки (10), на которых размещены постоянные магниты начальной установки (11), имеющие вектор намагниченности поперек активной поверхности датчиков Холла (8, 9). На основании вне зоны действия поля магнитов индуктора (1) установлены магниты (12) с вектором намагниченности, противоположным вектору намагниченности магнитов начальной установки (11). Магниты (12) установлены таким образом, что при перемещении корпуса с якорем (4) концевые датчики (8) и датчик зоны нулевой метки (9), установленные на плате (6), оказываются над магнитами (12) и взаимодействуют с указанными магнитами. Технический результат состоит в расширении функциональных возможностей по прецизионному управлению в зоне нулевой метки и концевых положениях, упрощении конструкции, повышении помехоустойчивости, надежности работы, в обеспечении более компактного размещения датчиков. 1 з.п. ф-лы, 2 ил.
Изобретение относится к электрическим машинам, а именно к линейным электродвигателям, и может быть использовано в устройствах для перемещения механизмов с последующим позиционированием в заданном положении.
Известны линейные электродвигатели, содержащие индуктор с постоянными магнитами, установленный на основании, корпус с якорем, установленный на механических опорах с возможностью линейного перемещения вдоль магнитной системы индуктора [Электромагнитный привод робототехнических систем. Киев. Наукова думка. 1986, с.42-45].
Получению требуемого технического результата препятствуют ограниченные функциональные возможности устройства по прецизионному управлению электродвигателем.
Известен линейный электродвигатель, содержащий индуктор с постоянными магнитами, установленный на основании, корпус с якорем, установленный на механических опорах с возможностью линейного перемещения вдоль магнитной системы индуктора, соединенный с платой, на которой установлены датчики Холла [Заявка США US2008/169806, МПК G01R 33/06, опубл. 17.07.2008 г.].
Получению требуемого технического результата препятствуют ограниченные функциональные возможности устройства по прецизионному управлению электродвигателем.
Наиболее близким к изобретению по совокупности существенных признаков (прототипом) является техническое решение линейного электродвигателя, содержащего индуктор с постоянными магнитами, установленный на основании, корпус с якорем, установленный на механических опорах с возможностью линейного перемещения вдоль магнитной системы индуктора, соединенный с платой, на которой установлены датчики Холла, расположенные в зоне действия магнитного поля индуктора [О.Н.Веселовский, А.Г.Баракин, А.Ю.Зибарев, О.А.Рокачевский. Линейный электродвигатель для прецизионного оборудования. - Станки и инструменты. 1991, №12, стр.5-7].
Получению требуемого технического результата препятствуют недостаточные функциональные возможности устройства по прецизионному управлению электродвигателем в зоне нулевой метки и концевых положениях.
Задачей, на решение которой направлено заявляемое изобретение, является улучшение управления линейным электродвигателем.
Технический результат заключается в расширении функциональных возможностей по прецизионному управлению электродвигателем в зоне нулевой метки и концевых положениях, упрощении конструкции электродвигателя, повышении помехоустойчивости, повышении надежности работы электродвигателя, в обеспечении более компактного размещения датчиков.
Для достижения вышеуказанного технического результата линейный электродвигатель содержит индуктор с постоянными магнитами, установленный на основании, корпус с якорем, установленный на механических опорах с возможностью линейного перемещения вдоль магнитной системы индуктора, соединенный с платой, на которой установлены датчики Холла, расположенные в зоне действия магнитного поля индуктора, на плате дополнительно установлены концевые датчики и датчик зоны нулевой метки, выполненные в виде датчиков Холла, на которых размещены немагнитные прокладки, на немагнитных прокладках размещены постоянные магниты начальной установки, имеющие вектор намагниченности поперек активной поверхности датчиков, а на основании вне зоны действия поля магнитов индуктора установлены магниты с вектором намагниченности, противоположным вектору намагниченности магнитов начальной установки, с возможностью взаимодействия с концевыми датчиками и датчиком зоны нулевой метки в виде датчиков Холла при перемещении корпуса с якорем.
Отличительными от наиболее близкого аналога (прототипа) признаками заявляемого изобретения являются следующие признаки: на плате дополнительно установлены концевые датчики и датчик зоны нулевой метки, выполненные в виде датчиков Холла; на датчиках размещены немагнитные прокладки; на немагнитных прокладках размещены постоянные магниты начальной установки, имеющие вектор намагниченности поперек активной поверхности датчиков; на основании вне зоны действия поля магнитов индуктора установлены магниты с вектором намагниченности, противоположным вектору намагниченности магнитов начальной установки, с возможностью взаимодействия с концевыми датчиками и датчиком зоны нулевой метки в виде датчиков Холла при перемещении корпуса с якорем. Указанные отличительные признаки обеспечивают формирование сигналов конечного положения подвижной части линейного двигателя, также позволяют упростить его конструкцию за счет объединения кабелей связи от датчиков Холла и концевых датчиков в один кабель.
В частном случае выполнения изобретения суммарный немагнитный зазор между концевыми датчиками, датчиком зоны нулевой метки и магнитами с вектором намагниченности, противоположным вектору намагниченности магнитов начальной установки, меньше толщины немагнитной прокладки.
Изобретение поясняется чертежами.
Изобретение осуществляется следующим образом.
Линейный электродвигатель содержит индуктор 1 с постоянными магнитами 2, установленный на основании 3, корпус с якорем 4, установленный на опорах 5 (фиг 1, 2). Корпус с якорем 4 установлен на опорах 5 с возможностью линейного перемещения вдоль магнитной системы индуктора 1. Корпус с якорем 4 соединен с платой 6. На плате 6 установлены датчики Холла 7, расположенные в зоне действия магнитного поля индуктора 1, концевые датчики 8 и датчик зоны нулевой метки 9. Датчики 7 предназначены для формирования тока в фазах якоря. Концевые датчики 8 и датчик зоны нулевой метки 9 выполнены в виде датчиков Холла. На концевых датчиках 8 и датчике зоны нулевой метки 9 размещены немагнитные прокладки 10. На немагнитных прокладках 10 размещены постоянные магниты начальной установки 11. Постоянные магниты начальной установки 11 имеют вектор намагниченности поперек активной поверхности датчиков Холла 8 и 9. На основании вне зоны действия поля магнитов индуктора 1 установлены магниты 12 с вектором намагниченности, противоположным вектору намагниченности магнитов начальной установки 11. Магниты 12 установлены таким образом, что при перемещении корпуса с якорем 4 концевые датчики 8 и датчик зоны нулевой метки 9, установленные на плате 6, оказываются над магнитами 12 и взаимодействуют с указанными магнитами. Плата 6 соединена с панелью разъемов кабелем.
Суммарный немагнитный зазор между концевыми датчиками 8, датчиком зоны нулевой метки 9 и магнитами 11 с вектором намагниченности, противоположным вектору намагниченности магнитов начальной установки, меньше толщины немагнитной прокладки 10.
Датчики Холла 7 представляют собой магниточувствительные компараторы и предназначены для выработки сигналов в систему управления с целью формирования тока в фазах обмотки якоря. Датчики Холла 8 и 9 также представляют собой магниточувствительные компараторы.
Концевые датчики предназначены для формирования электрических сигналов в зоне конечных положений подвижной части линейного электродвигателя, в частности корпуса с якорем. Зона конечного положения расположена в непосредственной близости на величине тормозного пути при электромагнитном торможении от механических упоров, установленных на основании, для ограничения перемещения подвижной части вдоль магнитной системы индуктора. Данные сигналы необходимы для системы управления с целью принудительного останова подвижной части, электромагнитного торможения и предотвращения наезда на механические упоры.
Датчик зоны нулевой метки предназначен для формирования электрического сигнала в зоне нулевой метки. Данная зона, как правило, расположена на небольшом расстоянии (10-20 мм) от концевой зоны. Данный сигнал поступает в систему управления линейным электродвигателем и необходим для начала поиска нулевой метки, которая расположена на точном датчике положения (энкодере).
Устройство работает следующим образом. При включении питания концевые датчики 8 и датчик зоны нулевой метки 9 устанавливаются в исходное состояние за счет магнитов начальной установки 11. При движении корпуса с якорем 4 вдоль индуктора 1 концевые датчики 8 и датчик зоны нулевой метки 9 в определенном положении попадают в магнитное поле магнитов 12, поле которых сильнее поля магнитов 11 и направлено в противоположную сторону, что заставляет датчики переходить в другое электрическое состояние, например из логического «0» в логическую «1». При смещении корпуса 4 с платой 6 и, таким образом, выходе датчиков 8, 9 из зоны действия поля магнитов 12 датчики 8 переходят в исходное состояние за счет действия поля магнитов 11.
Предлагаемое решение размещения и выполнения датчиков и магнитов за счет их взаимодействия обеспечивает увеличение помехоустойчивости и повышение надежности работы линейного электродвигателя.
Устройство было использовано в линейных электродвигателях. Испытания подтвердили, что конструкция предлагаемого устройства позволяет осуществлять полную систему управления линейным электродвигателем.